- Čeština
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
Pracovní principy měničů frekvence, metody řízení a aplikace
Katalog
Přehled měniče frekvence (VFD)
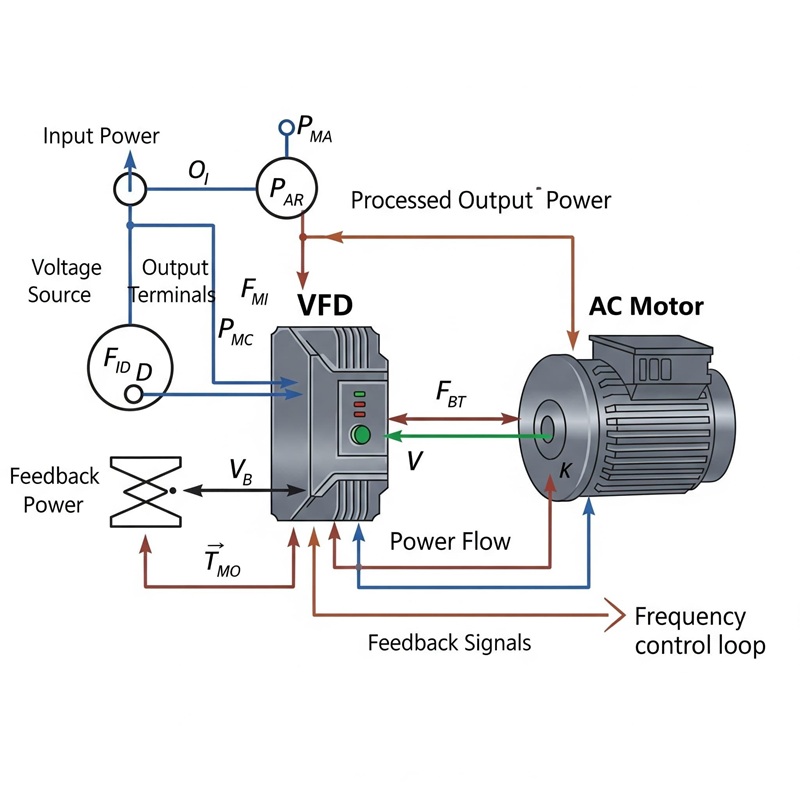
Měnič frekvence (VFD) je regulátor silnoproudé elektroniky, který řídí rychlost a točivý moment AC motoru úpravou elektrické frekvence statoru a zároveň koordinuje výstupní napětí a proud, aby magnetický tok motoru a proud vytvářející točivý moment zůstávaly v pracovním pásmu. Na výrobním podlaží se obvykle projevuje spíše jako disciplinovaný regulátor točivého momentu a proudu, který produkuje požadovanou rychlost, když jsou elektrické podmínky na svorkách motoru pod kontrolou.
U většiny AC motorů elektrická frekvence do značné míry určuje rychlost rotačního magnetického pole a rychlost motoru, přičemž prokluz indukčního motoru vytváří malý rozdíl mezi oběma. Jak se frekvence mění, měnič upravuje napětí, aby udržel správný magnetický tok. Příliš málo toku může snížit točivý moment a reakci, zatímco příliš mnoho toku může zvýšit proud, teplo a hluk.
Mnoho moderních měničů také řídí proud motoru přímo, aby udrželo stabilní točivý moment při nízkých rychlostech, během náhlých změn zátěže nebo když se vlastnosti motoru mění v důsledku změny teploty.
Při uvedení do provozu a odstraňování poruch je běžné mít pocit, že řízení frekvence by mělo vše vysvětlit, dokud první rychlé zrychlení, náhlé zpomalení nebo šok zátěže neodhalí mezery. Každodenní rozdíly v výkonu mezi měniči se často projevují v kvalitě měření proudu, ladění proudové smyčky a jak elegantně měnič spravuje přechody spíše než v samotném základním povelu frekvence.
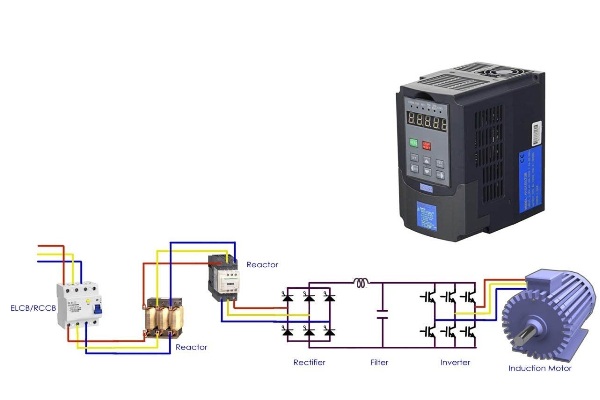
Většina průmyslových VFD používá strukturu AC–DC–AC, protože je obvykle robustní, nákladově efektivní a přizpůsobivá širokému spektru typů motorů a pracovních profilů.
Přední usměrňovač převádí přicházející AC na DC. Nejčastější implementace na třífázových napájeních je most s 6 diodami. Přibližná úroveň DC sběrnice při nulovém zatížení je:
VDC ≈ 1.414 × VLL
Příklady často viděné při měřeních v terénu:
• 380 VAC třífázově → ~537 VDC
• 220 VAC jednofázově → ~311 VDC
Diodový most je jednoduchý a spolehlivý, avšak odebírá nesinusový proud z elektrické sítě, což může vytvářet harmonické a zvyšovat zátěž na slabých elektrických systémech. V některých instalacích mohou být problémy, jako jsou zbytečné výpadky, zahřívání transformátorů nebo nestabilní provoz, způsobeny interakcí mezi harmonickými proudy a impedancí vedení, spíše než samotným motorem.
Běžné možnosti zmírnění v průmyslových panelech:
• Vedení reaktory (AC tlumivky)
• DC-link tlumivky
• EMI/RFI filtry
Alternativy usměrňovače volené pro specifické chování:
• SCR (thyristorové) usměrňovače pro omezené řízené nabíjení (nyní méně běžné v nových stavbách)
• Aktivní přední části (AFE) používající IGBT pro zlepšení účinníku, snížení harmonických a umožnění regenerace zpět do sítě
Praktický způsob, jak rámovat rozhodnutí o usměrňovači, je, že definuje, jak se pohon vyrovnává s elektrickou sítí. Překvapující množství problémů, které byly původně přičítány motorům, se ukáže, že se vrací k kompatibilitě na vstupní straně a podmínkám linky.
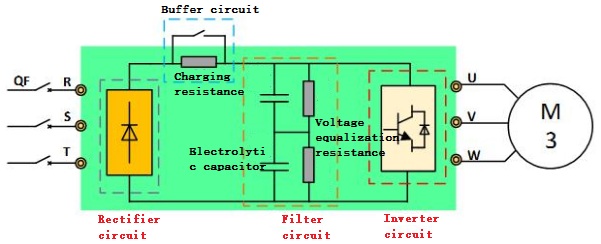
Při energizaci vypadají DC-link kondenzátory zpočátku jako krátký obvod. Bez řízení náběhu může usměrňovač a ochrana proti přetížení zaznamenat náhlý náraz proudu, který připadá systému jako tvrdý úder. Většina pohonů to řeší přednabíjecí cestou, která omezuje proud, zatímco sběrnice se nabíjí, a poté přechází na normální provoz.
Typické prvky přednabíjení:
• Sériový rezistor v DC sběrnici během spuštění
• Obtokový kontaktor nebo relé, které se uzavírá po zvýšení napětí kondenzátoru
V reálných instalacích se chyby přednabíjení často objevují jako přerušované neúspěchy při spuštění, alarmy časového zpoždění nabíjení nebo problémové chattering kontaktoru. Mezi běžné příčiny patří stárnoucí přednabíjecí rezistory, opotřebované obtokové kontakty a podmínky podnapětí během spuštění, které brání pohonu správně dokončit proces nabíjení.
DC-link zjemňuje pulzace usměrňovače a poskytuje krátkodobé ukládání energie, když se zátěž mění rychleji, než může zdroj reagovat. Obvykle zahrnuje více prvků, z nichž každý hraje jinou roli, místo jediné „jedna část vyřeší vše“ řešení.
Typické komponenty DC-link:
• Elektrolytická kondenzátory
• Vybíjecí a/nebo vyvažovací rezistory
• Někdy filmové kondenzátory pro potlačení vysokofrekvenčních pulzací
Pro vyšší sběrnicové napětí mohou být kondenzátory připojeny v sérii. Protože skutečné kondenzátory nedělí napětí dokonale, jsou přidány vyvažovací rezistory, aby se snížilo nerovnoměrné rozložení napětí, které urychluje stárnutí a může jednoho kondenzátoru poslat do stavu předčasné poruchy. V rámci servisu může pohon pokračovat v chodu s degradovanou kapacitou, což může být klamavě uklidňující; pak začne ostřeji reagovat na poklesy linie, regenerační události nebo rychlé změny zatížení. Tato změna v „toleranci“ je často první náznak, že zdraví DC-linku klesá.
Na mnoha místech dosahuje sada kondenzátorů DC-link konec své životnosti dříve než IGBT, ne proto, že by byl design špatný, ale protože teplo a pulzační stres se tiše hromadí v průběhu času. To je důvod, proč řízení průtoku vzduchu, derating při vysokých okolních teplotách a mírné volby nosné frekvence často přinášejí úspory v menším počtu neobjasněných tripů a menším počtu obnov pohonů v ústředním období.
Invertorový můstek syntetizuje řízený třífázový výstup z DC sběrnice, obvykle s použitím IGBT řízených PWM. Antiparalelní diody napříč IGBT poskytují cestu proudu během přepínačových přechodů a podporují kontinuitu proudu, když indukčnost motoru „trvá“ na udržení průtoku proudu.
PWM umožňuje těsné řízení, ale také produkuje rychlé napěťové hrany (vysoké dV/dt). Zvyšování přepínací (nosné) frekvence často snižuje slyšitelný šum a pulzace proudu, zatímco zvyšuje ztráty při přepínání a vnitřní zahřívání. V praxi zahrnují nastavení kompromisy, které mohou operátoři okamžitě pocítit, tichost na straně motoru versus teplotní rezerva uvnitř pohonu.
Běžné provozní kompromisy:
• Nižší nosná frekvence: chladnější pohon, více akustického šumu motoru a pulzací točivého momentu
• Vyšší nosná frekvence: tišší motor, teplejší pohon, více stresu na komponenty s časem
Délka kabelu a stáří motoru mohou tlačit požadavky na výstup směrem, který překvapí lidi, kteří se dívají pouze na jmenovité výkony na štítku. Dlouhé vedení a starší izolační systémy mohou těžit z dodatečných opatření.
Běžné přídavky a praktiky na výstupní straně:
• dV/dt filtry nebo sínusové filtry
• Správné uzemnění a štítění kabelových praktik pro snížení ložiskových proudů a problémů EMI
Když motor zpomaluje nebo zátěž pohání motor (podmínka přetížení), stroj může generovat energii zpět do DC sběrnice. Napětí sběrnice stoupá a pohon musí tuto energii směrovat nebo rozptýlit, aby se vyhnul tripu při přepětí DC. To je jedno z těch chování, které se může zdát náhodné, dokud není tok energie viděn jasně: setrvačnost a výběr profilů rychlosti často dominují výsledku.
Běžné používané metody pro zpracování regenerační energie:
• Dynamické brzdění (brzdový chopper + rezistor): převádí regenerační energii na teplo; široce používané, protože chování je předvídatelné a hardware je jednoduchý
• Regenerační přední část (AFE nebo samostatná regenerační jednotka): vrací energii do sítě; často vybíráno, když se brzdění často opakuje nebo když se obnova energie shoduje s provozními cíli
• Delší zpomalovací rampy: snižuje špičkovou regenerační výkonovou hodnotu; někdy dost na to, aby se vyhnul přidání brzdového hardwaru
Při odstraňování problémů často přestávají přepínače nadproudu DC aktivovat po uvolnění času zpomalení nebo když je brzdová technika dimenzována podle skutečné setrvačnosti. Co se však často přehlíží, je to, jak agresivně je konfigurán rychlostní profil v poměru k mechanické energii uložené v zatížení.
Ovládání VFD se pohybuje od jednoduchých skalarových přístupů po rychlé metody s regulací proudem. „Pocit“ stroje, zejména při nízké rychlosti nebo během skoků v zatížení, silně závisí na tom, která kontrolní rodina je použita a jak dobře odpovídá model motoru realitě.
V/Hz udržuje přibližně konstantní poměr napětí k frekvenci. Často je to pohodlné řešení pro ventilátory a čerpadla, kde je poptávka po točivém momentu rozumně předvídatelná a dynamika je mírná. Kde se obvykle ukazují jeho limity, je tuhost točivého momentu při nízkých rychlostech a odezva během náhlých změn zatížení, kdy systém může působit mírně vágně nebo zpožděně.
Vektorové řízení (FOC) a DTC používají senzory proudu/napětí a rychlé výpočty (CPU/DSP) k regulaci komponentů proudu produkujících tok a točivý moment. Výsledkem je jistější reakce na točivý moment, zvláště blízko nuly rychlosti a během rychlých přechodů, a regulace rychlosti se dále zlepšuje, když je použita zpětná vazba z enkodéru.
Běžné výkonnostní výsledky spojené s těmito metodami:
• Silnější chování točivého momentu při nízkých rychlostech
• Rychlejší reakce na změny zatížení
• Přísnější regulace rychlosti, zejména s enkodérovou zpětnou vazbou
V mnoha instalacích proces automatického ladění pomáhá zlepšit výkon přizpůsobením kontrolního modelu skutečným elektrickým charakteristikám motoru, místo aby se spoléhalo na výchozí hodnoty parametrů. To často vede k přesnějšímu a stabilnějšímu řízení motoru.
VFD mění více než pouze otáčky motoru. Ovlyvňuje tepelný chování motoru, schémata mechanického zatížení a kvalitu napájení, a tyto vedlejší účinky se obvykle projevují poté, co novost proměnlivé rychlosti vyprchá.
Běžně přehlížené systémové dopady:
• Chlazení motoru při nízké rychlosti: hřídelové ventilátory pohybují méně vzduchu; nepřetržitý točivý moment při nízkých rychlostech může vyžadovat samostatně napájený ventilátor nebo motor s hodnocením pro invertorová zatížení
• Schémata mechanického namáhání: hladší akcelerace může snížit rázové zatížení, zatímco agresivní limity točivého momentu mohou přispět k prokluzu řemenu, namáhání spojek nebo rezonanci
• Kvalita napájení: diodové přední části zavádějí harmonické frekvence; více pohonů na sdíleném zdroji může vyžadovat koordinované zmírnění
• Ochrana a bezpečnost: integrované detekce závady (přetížení, nad-/podnapětí, přehřátí, zemní závady) a funkce jako Safe Torque Off (STO) mění způsob, jakým jsou systémy zapojeny, validovány a udržovány
Stabilní výsledky jsou zřídka dosaženy, když se všechno nechá na výchozích hodnotách a doufá, že proces bude jemný. Předvídatelnost obvykle pochází z krátkého, metodického rytmu nastavení, který je méně dramatický než hrdinské odstraňování problémů, ale mnohem uspokojivější, když stroj běží čistě směnu za směnou.
Seznam kontrol, který se často vyplatí při uvedení do provozu:
• Zadejte přesné údaje na štítku motoru (napětí, proud, frekvence, rychlost a účiník, pokud to pohon požaduje)
• Vyberte kontrolní režim, který odpovídá profilu zatížení (ventilátor/čerpadlo, konstantní točivý moment nebo vysokodynamická)
• Nastavte akceleraci/zpomalení na základě setrvačnosti a brzdné schopnosti, místo aby se spoléhalo na osobní preference
• Zvolte nosnou frekvenci, která odráží jak očekávání ohledně hluku, tak tepelnou rezervu
• Ověřte uzemnění, typ kabelu a délku kabelu před tím, než začnete pronásledovat přerušované nebo „falešné“ poruchy
Produktivní mentální model je považovat VFD za systém pro řízení energie se třemi jasnými úkoly: tvarovat vstupní elektrickou energii na straně linky, akumulovat energii v DC spojení a regulovat motorový proud na výstupní straně. Když je tento tok udržován na paměti, opakující se problémy, přepínače nadproudu DC, slabý točivý moment při nízké rychlosti, obtěžující poruchy a předčasné stárnutí komponentů se obvykle stávají snadněji vysvětlitelnými, testovatelnými a opravovatelnými.
Kategorizace VFD
Podle architektury výkonové etapy
VSI pohony jsou široce používány v průmyslových systémech, protože jejich topologie je jednoduchá a praktická. Pohon převádí AC vstup na DC sběrnici prostřednictvím diodového můstku nebo aktivní přední části, a poté používá inverter k generování napájení s proměnlivou frekvencí a napětím pro motor. Velké kondenzátory na DC sběrnici pomáhají udržovat stabilní napěťové dodávky a snižují kolísání napětí způsobené změnami zatížení.
V denním startovním pracovním procesu je tato architektura obvykle shovívavá vůči
běžným břemenům s proměnlivým točivým momentem, jako jsou čerpadla a ventilátory, což je důvod, proč často zanechává dobrý první dojem v terénu. Zároveň kombinace tuhé sběrnice a rychlých přepínacích okrajů může zvyšovat dv/dt na terminálech motoru, a tato realita se stává těžko ignorovatelnou, když jsou vodiče motoru dlouhé nebo když starší izolační systémy již žijí na vypůjčeném čase.
Běžné podrobnosti o uvádění do provozu, které pravidelně rozhodují, zda instalace VSI působí čistě, nebo neuspořádaně:
• Délka a vedení motorového kabelu
• Metoda uzemnění a kvalita propojení
• Strategie filtrace dv/dt nebo sínusového signálu
Hnací zařízení CSI zaujímají odlišné stanovisko: velký induktor v DC spojení tlačí systém směrem k relativně konstantnímu stejnosměrnému proudu a výstupní stupeň formuje motorový proud odpovídajícím způsobem. Dnes jsou méně často specifikována, přesto se stále objevují v prostředích s vysokým výkonem, středním napětím a robustním zatížením, kde ovládané chování proudu odpovídá rizikovému profilu a provozní kultuře závodu.
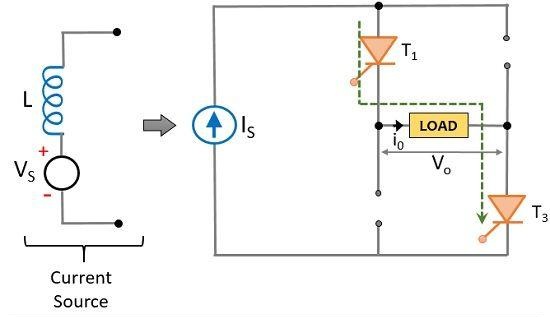
V praxi se zdá, že CSI obchoduje pohodlí za předvídatelnost. Hardwarová náročnost je větší, prostor pro konfiguraci může působit užším dojmem a ekosystém snadno dostupných dílů a techniků je menší, než co většina týmů očekává u VSI. Přesto pro aplikace, které odpovídají silným stránkám CSI, může stabilnější chování proudu působit uklidňujícím dojmem, zejména když si místo cení konzervativního elektrického zatížení a trvalého provozu před kompaktností.
Typické trade-offy CSI, které formují skutečné projekty:
• Větší fyzická velikost a vyšší složitost systému
• Méně běžných možností servisu a náhradních dílů
• Silné naplnění určitými aplikacemi MV a těžkého zatížení
Diskuze o pohonech se často soustředí na měnič, ale často právě přední část rozhoduje o chování systému na sběrnici závodu a během brzdění. Diodová přední část je jednoduchá a šetrná k rozpočtu, ale přijímá nesinoidální vstupní proud a obvykle nemůže vracet energii zpět do sítě. AFE může zlepšit účiník, snížit harmonicitu a podpořit regeneraci.
Tento rozdíl se stává bolestně zřejmým v procesech s častým zpomalením nebo přetěžováním. Když se stroj opakovaně vypíná v důsledku přepětí na DC sběrnici během rychlých zastavení, je lákavé svalit vinu na ladění, ale nepříjemná pravda je často nesoulad v energetickém zpracování: energie se vrací rychleji, než ji systém může vstřebat nebo vrátit.
Možnosti přední části a zpracování energie běžně volené v terénu:
• Diodová přední část
• Aktivní přední část
• Brzdový rezistor / dynamický brzdový chopper
• Regenerativní zařízení nebo sdílené DC sběrnicové řešení
• Delší zpomalovací rampy sladěné s tolerancí procesu
Klasifikace podle metody přepínání a modulace
Starší pohony se někdy spoléhají na PAM nebo dřívější modulace spojené s historickými napájecími zařízeními a řídicími hardwary. Tyto systémy se stále objevují v dlouhověkých zařízeních a mohou běžet spolehlivě, až do okamžiku, kdy začíná podpora životního cyklu připadat jako hádání. Ve srovnání s moderními PWM přístupy obvykle zaostávají v účinnosti, akustickém chování a ovladatelnosti.
Z pohledu údržby je emocionální “tlakový bod” zřídka výkon, ale nejistota. Když se náhradní komponenty stávají vzácnými a dokumentace je slabá, plánování modernizace se obvykle soustředí na migraci na současné PWM pohony, přičemž respektuje stávající motory, kabeláže a procesní omezení.
PWM je moderním standardem, protože nabízí flexibilní řízení napětí a frekvence a podporuje řídicí režimy, které dnes většina týmů očekává. Space-vector PWM je široce používána, protože zlepšuje využití DC sběrnice a může snížit harmonickou zkreslení motorového proudu.
Jeden operační detail, který zkušení technici se učí brát s pokorou, je, že kvalita PWM signálů vždy přichází s náklady. Čistější proud obvykle vyžaduje větší aktivitu přepínání, což zvyšuje ztráty při přepínání a tepelnou zátěž. Nejlepší výsledky obvykle přicházejí z vyvážení nosné frekvence, tepelného prostoru a cílů slyšitelného hluku spíše než honění za jediným nejlepším nastavením.
Běžné páky konfigurace PWM, které se obvykle vzájemně vyměňují:
• Nosná frekvence
• Tepelná rezerva a schopnost chladiče/větráku
• Očekávání slyšitelného hluku
• Kolísání motorového proudu a tolerance kolísání točivého momentu
Zvyšování nosné frekvence často snižuje kolísání proudu a může posunout šum přepínání nad nejoslouchanější slyšitelný rozsah. V obsazených prostorech může tato změna působit jako úleva a u některých strojů přímo zlepšuje vnímanou kvalitu výrobku.
Omezením je správa tepla. Vyšší frekvence přepínání zvyšuje ztráty měniče a to může tlačit pohon k deratingu, silnějšímu proudění vzduchu v pouzdru nebo větší velikosti rámu. Mnohé stížnosti z terénu, které se objevují jako “tajemné přehřívání”, se stávají mnohem méně tajemnými, jakmile jsou společně vyhodnoceny nosná frekvence, okolní teplota, omezení pouzdra a pracovní cyklus.
Opatření související s teplem často používaná k stabilizaci nastavení s vysokou nosnou frekvencí:
• Snížit nosnou frekvenci na realistickou úroveň pro pracovní cyklus
• Snížit výstupní proud a revidovat očekávání přetížení
• Zlepšit ventilaci skříně nebo dráhu chlazení
• Přesunout se na větší velikost rámu pro disky
VFD středního napětí často používají víceúrovňové invertorové topologie, aby snížily napěťové kroky a zlepšily kvalitu vlnění. Zařízení s širokým pásmem, jako jsou SiC a GaN, mohou přepínat rychleji a efektivněji, což se může zdát jako technické vítězství, dokud rychlé okraje nezvýší napětí dv/dt a elektromagnetické rušení v uspořádáních, která nejsou provedena s disciplinou.
Pragmatický způsob, jak na to myslet, je, že rychlejší přepínání může zlepšit ovladatelnost a zároveň učinit instalační detaily viditelnějšími. Když ložiska motoru vykazují předčasné opotřebení nebo když senzory začnou chovat hlučně, příčinou je často běžné napětí a praxe zapojení/uzemnění, nikoli jakákoliv nedostatečnost v řídicím algoritmu.
Instalace a zm Mitigační položky, které často určují výsledky s rychlými okraji:
• Výběr kabelu pro motor a přístup k stínění
• Uzemňovací a spojovací topologie
• Filtry dv/dt na výstupu nebo sínusové filtry
• Zm Mitigace elektrických proudů ložisek
• Uvědomění EMI o uspořádání a oddělení signál/power wiring
Klasifikace podle řídicí filozofie
V/Hz kontrola udržuje vztah napětí k frekvenci, který udržuje tok magnetického pole motoru v pracovním rozmezí. Je to jednoduché, stabilní v mnoha instalacích a široce používané na variabilních točivých zatíženích, jako jsou ventilátory a odstředivé čerpadla.
Tento přístup má tendenci se osvědčit, když proces nevyžaduje těsné řízení točivého momentu při velmi nízké rychlosti. V praxi často uspěje, protože snižuje úsilí potřebné na ladění a snižuje šanci na oscilace způsobené nesprávnými parametry motoru. Kompromisem je skromná dynamická odezva, zejména při rychlých změnách zatížení, kdy proces požaduje a pohon reaguje o chvíli později.
Řízení vektorem odděluje složky produkující točivý moment a složky produkující tok tím, že odhaduje nebo měří stavy motoru. Ovládání vektorem bez senzoru může dosáhnout působivých výsledků bez enkodéru, ale silně se opírá o přesné údaje o motoru a rozumně stabilní provozní podmínky. Řízení v closed-loop přidává enkodér nebo resolver, což obvykle zlepšuje chování točivého momentu při nízké rychlosti, přesnost a odezvu na přechody.
V praxi mnohé problémy s řízením vektorem vycházejí z parametrů než z teorie. Údaje na typovém štítě jsou často výchozím bodem, nikoliv cílovou čárou. Krátký identifikační běh, rozumné volby základní frekvence a realistické limity proudu často promění pohon, který se zdá být měkký, na ten, který udržuje rychlost a točivý moment způsoby, kterým operátoři mohou důvěřovat.
Položky nastavení řízení vektorem, které běžně rozhodují o výkonu:
• Ověřené údaje na typovém štítku motoru
• Výsledky ID motoru / autotuningu a jejich plausibilita
• Výběr základní frekvence v souladu s návrhem motoru
• Limity proudu a limity točivého momentu sladěné s mechanikou
DTC reguluje točivý moment a tok přímoji, což umožňuje velmi rychlou odezvu točivého momentu v aplikacích s ostrými přechody a náročným chováním točivého momentu.
Rozhodovací bod není zřídka jen rychlost odezvy; je to, jak mechanický systém toleruje tuto odezvu. Pohon, který může téměř okamžitě změnit točivý moment, může také vzbudit rezonance, pokud jsou náběhy a limity nastavovány příliš agresivně. Nejrobustnější nastavení považují motor, spojku, převodovku a zatížení za jeden propojený systém, a pak tvarují profily zrychlení a limity točivého momentu tak, aby odpovídaly tomu, co mechanika může bez protestů absorbovat.
Kategorie řízené aplikací
Pohony pro všeobecné použití kladou důraz na širokou kompatibilitu a cenově uvědomělé sady funkcí. Vysoce výkonné pohony obvykle poskytují těsnější řízení proudu, bohatší zpětnou vazbu a možnosti I/O, vyšší přetížitelnost a pokročilejší diagnostiku.
Insight o výběru, který se opakovaně objevuje v reálných projektech, je, že vysoce výkonné funkce se vyplatí nejvíce, když proces vyžaduje opakovatelnost pod rušením, nikoli pouze tehdy, když je hodnocení motoru velké. Řada velkých systémů ventilátorů běží hladce na pohonech pro všeobecné použití V/Hz, zatímco menší systémy pro kontrolu napětí, indexování nebo těsné řízení rychlosti často těží z řízení vektorem a zpětné vazby.
Typické oddělovače mezi třídami pohonů v diskusích o akvizicích:
• Přetížitelnost a sofistikovanost tepelných modelů
• Podpora zařízení zpětné vazby (enkodér/resolver)
• Hluboké diagnostiky a nástroje pro sledování/monitorování
• Flexibilita I/O a integrační funkce
Použití spindle vyžaduje vysokou kapacitu elektrické frekvence, stabilní regulaci rychlosti a uvážlivé zacházení s vytápěním motoru při zvýšených otáčkách RPM. Tyto pohony často kladou důraz na rychlé přepínací výkony a specializované funkce ochrany motoru přizpůsobené pro hřídele.
V praxi má volba pohonu tendenci jít hladčeji, když respektuje izolační systém a strategii ložisek motoru vřetena, namísto toho, aby se úzce soustředila na maximální rychlost. Když vřetena selhávají předčasně, základní příčinou je často tepelná správa, mazání nebo elektrické proudy v ložiscích, problémy, které mohou být frustrující, protože se maskují jako problémy s řízením.
Kontroly související s vřetenem, které často zabraňují nepříjemným překvapením:
• Vhodnost izolačního materiálu motoru pro rychlé okraje a vysokou frekvenci
• Přístup k mitigaci ložiskových proudů
• Tepelné limity v celém zamýšleném rozsahu rychlosti
• Předpoklady pro chlazení a mazání při reálných pracovních cyklech
Pohony s jednofázovým vstupem jsou běžné v lehkém průmyslu a komerčních prostředích, ale často jsou sníženy, protože vstupní proud stoupá při stejné výstupní výkonu. Třífázový vstup obvykle rovnoměrněji distribuuje vstupní proud a pohodlněji se škáluje, jak se výkon zvyšuje.
Praktickým detailem instalace je plánování kapacity v ústí. Nepříjemné spouštění a přehřáté kabely jsou často vysledovány k podcenění jednofázového vstupního proudu, ignorování chování při rozběhu nebo ignorování, jak harmonické interagují s ochrannými zařízeními.
Požadavky, které obvykle ovlivňují výsledky instalace:
• Výběr velikosti jističe/fúze a křivky spouštění
• Velikost vodiče a vzestup teploty v chráničkách/ložiscích
• Chování při rozběhu a předběžném nabíjení
• Dopad harmonických na ochranu a zařízení v ústí
Funkční terminologie
U většiny AC motorů užitečný krouticí moment v rozsahu rychlosti vychází z koordinace napětí s frekvencí. Tato koordinace je v centru toho, co VFD dělá, i když je řídicí metoda sofistikovaná. Základní omezení zůstává stejné: magnetický tok motoru musí zůstat v rozumných mezích, aby se předešlo slabému krouticímu momentu na jedné straně a přehřívání na druhé.
Stabilním způsobem, jak interpretovat „VVVF“, je připomenout fyziku motoru spíše než značkovou nálepku. Když se odstraňují problémy se slabým krouticím momentem nebo neočekávaným zahříváním, jasnost často rychle přichází z kontroly, zda požadované napětí, požadovaná frekvence a limity proudu skutečně odpovídají pracovnímu bodu motoru a požadavkům zatížení.
CVCF popisuje regulované zdroje energie navržené tak, aby držely napětí a frekvenci stabilní, podobně jako dodávka utilities. Tento model není orientován na změnu rychlosti motoru.
Když je cílem řízení rychlosti, CVCF má tendenci posílat myšlení špatným směrem. Řízení rychlosti závisí na proměnné frekvenci a stabilní chování krouticího momentu obvykle následuje, když je napětí spravováno v souladu s frekvencí pod omezeními motoru a aplikace.
Řídicí režimy pro nízkonapěťové VFD

Proč řídicí režim stále formuje výsledky v reálném světě v moderních nízkonapěťových pohonech
Moderní nízkonapěťové, univerzální VFD (typicky třída 380–690 VAC, přibližně 0,75–400 kW, s výstupem 0–400 Hz) často vypadají podobně z pohledu hardwaru, což může týmy uklidnit v očekávání podobného chování na stroji. V terénu se rozdíl rychle projeví: řídicí režim do značné míry určuje, jak se pohon chová, když se proces stává chaotickým, při studených startéch, skocích zatížení, dlouhých kabelech, okrajových motorech a operátorech, kteří nekontrolují ladění.
To, co nakonec strategie řízení ovlivňuje, není abstraktní; stává se to sadou každodenních rysů, které údržba a výroba zaznamenávají.
Schopnost krouticího momentu při nízkých rychlostech; přesnost držení rychlosti; přechodová odpověď na skoky zatížení; akustický hluk; harmonické zkreslení; zahřívání motoru/tepelné namáhání; citlivost na odchylku parametrů; citlivost na kvalitu uvedení do provozu.
V praxi je nejlepším provozním režimem obvykle ten, který splňuje požadavky na krouticí moment a odezvu, zatímco zůstává stabilní během změn teploty, variací zatížení a neideálních provozních podmínek. Režimy, které se chovají dobře pouze během demonstrací, mohou později vytvořit problémy, pokud se objeví neustálé ladění, stížnosti na hluk nebo nestabilní chování po výměně motoru či změnách systému.
Generace 1: SPWM s pevným V/Hz (Skalární řízení)
Skalární řízení udržuje přibližně konstantní poměr V/Hz, takže magnetický tok vzduchové mezery motoru zůstává blízko požadované úrovně, když se frekvence mění. Při sinusoidním PWM (SPWM) je implementace přímočará, nákladový profil je příznivý a chování je obvykle stabilní, když je zatížení plynulé a použitelný rozsah rychlosti není extrémní.
Při nízké frekvenci je řízené napětí statoru inherentně malé. To způsobuje, že pokles odporu statoru (I·Rs) je nepřiměřeně velký ve srovnání s aplikovaným napětím, takže tok klesá pod zamýšlenou úroveň. Výsledkem není nic subtilního: schopnost krouticího momentu klesá, motor může zkolabovat pod zátěží a některé stroje vyvíjejí nepříjemnou "ráz" nebo oscillaci, kterou operátoři interpretují jako mechanický problém.
Dva další efekty často umocňují frustraci blízko nulové rychlosti: mrtvá doba měniče a napěťové ztráty polovodičů. Tyto ztráty dále snižují účinné napětí na svorkách motoru, což je jeden z důvodů, proč se dva pohony se stejným jmenovitým výkonem kW mohou chovat znatelně jinak během pomalého pohybu a polohování.
Instalace, které se drží skalar kontrolu, ale stále chtějí přijatelnou nízkorychlostní chování, obvykle skládají několik pragmatických úprav. Každá z nich může pomoci a každá může také vytvořit nový režim selhání, pokud je příliš tlačena.
• Zesílení napětí / Kompenzace IR: přidává extra napětí při nízkých frekvencích k offsetu I·Rs; zlepšuje startovací točivý moment, ale agresivní nastavení mohou přefiltrovat motor a zvýšit zahřívání.
• Kompenzace skluzu: přidává frekvenci jako funkci zatěžovacího proudu, aby se snížil pokles rychlosti indukčního motoru; může utáhnout dopravníky a mixéry, přesto může vyvolat honbu, když jsou mechanika elastické nebo zpětná vazba proudu je hlučná.
• Vícebodové V/f křivky: používá kusovou V/f tvarování místo jedné přímky; může přimět jeden problematický rychlostní pás, aby se choval, zatímco jinde dělá málo.
• +Zpracování rampy a limity proudu: upravuje akceleraci / deceleraci a chování limitování; často zabraňuje falešným spínáním na vysokoinertních zátěžích spolehlivěji než jedno "kouzelné" kompenzační knoflík.
Když aplikace vyžaduje silný točivý moment při velmi nízké rychlosti, časté obracení nebo důrazné omezování točivého momentu, skalar kontrola má tendenci proměnit se na cyklus malých zlepšení, které se nikdy necítí dokončené. Stroj může fungovat akceptovatelně po zahřátí a stabilním zatížení, pak však ztrácí stabilitu po změnách teploty, výměnách motoru nebo změnách délky kabelu, což je právě druh proměnlivosti, který způsobuje technikům nedůvěru k nastavení, i když to na papíře vypadá dobře.
Generace 2: SVPWM s vylepšenou skalar kontrolou
Pulse-width modulation v prostoru (SVPWM) používá vektorové spínací systémy měniče efektivněji než tradiční SPWM. Praktickým výsledkem je vyšší využití DC sběrnice a nižší harmonické zkreslení pro stejný hardware, což obvykle překládá na více použitelného základního napětí, hladší proud a často méně hluku motoru a zahřívání.
Když je SVPWM spárován s měřením proudu plus kompenzací napětí/toku při nízké rychlosti, mnoho skalar pohonů se na nízké rychlosti cítí méně "měkce" a drží rychlost přesvědčivěji při středních změnách zatížení. Pro týmy, které chtějí lepší chování bez změny kultury uvedení do provozu, to postupné zlepšení může být skutečně lákavé.
I při SVPWM, skalar kontrola skutečně neodděluje tok a točivý moment. Reakce točivého momentu je stále zprostředkována nepřímým vztahem mezi napětím, tokem a skluzem. Pod dynamickými požadavky často pohon reaguje poté, co se stav motoru již změnil, což se obvykle cítí pomaleji než přístupy, které regulují točivý moment přímo. To je důvod, proč skalar kontrola vylepšená SVPWM často vypadá jako zdokonalení spíše než jako změna pro vysokovýkonný pohyb.
SVPWM může produkovat měřitelné zisky, i když se nic jiného nezmění, ale větší zlepšení obvykle nastanou pouze po opětovném prozkoumání základních nastavení, kterými lidé pochopitelně spěchají během uvedení do provozu.
Nastavení, která často rozhodují, zda se SVPWM dostane do výroby:
• Základní frekvence
• Jmenovitá data motoru
• Minimální frekvence
• Kompenzace napětí/IR
• Limity proudu.
Mnoho stížností označených jako "nízkorychlostní nestabilita" se vrací k konzervativním limitům proudu nebo nesprávným parametrům motoru, spíše než k samotné metodě PWM, což může být skromné zjištění během odstraňování problémů.
Generace 3: Vektorová kontrola
Co přidává FOC: Oddělené ovládání pro točivý moment a tok
Vektorová kontrola převádí měřené fáze na proudy do rotujícího referenčního rámce, takže proud produkující tok a proud produkující točivý moment mohou být regulovány nezávisle, způsobem, který připomíná ovladatelnost DC motoru. V této fázi se řízení motoru mění z jednoduchého nastavovacího chování na přímé a přesné řízení pohonu. Výhodou je silnější točivý moment při nízké rychlosti a rychlejší reakce, protože točivý moment se stává přímo řízenou proměnnou spíše než vedlejším efektem skluzu.
Bez senzoru vs. uzavřená smyčka vektor: Rozdíl, který pocítíte na stroji
• Řízení beze senzorů: odhaduje polohu/flux rotoru pomocí napětí, proudu a modelu motoru; snižuje vedení a náklady; široce používané v běžném průmyslu; má tendenci mít potíže blízko nulové rychlosti, protože zpětné EMF je malé a chyby modelu se stávají nepřiměřeně vlivné.
• Řízení s uzavřenou smyčkou: používá enkodér nebo resolver; poskytuje konzistentní kroutící moment při nulové rychlosti a opakovatelné dynamické chování; často je voleno pro zdviháky, navijáky, výtahy a přesný pohyb; může usnadnit uvedení do provozu, když je mechanika citlivá na kolísání kroutícího momentu.
Citlivost parametrů: Obchod, s nímž žijete po spuštění
Výkon vektoru silně závisí na parametrech motoru a odhadu fluxu. Několik efektů může tiše posunout tyto parametry během normálního provozu a pohon bude mít takovou důvěru, jakou má jeho model.
Zdroje driftu a nesouladu, které se běžně objevují ve výrobě.
• Drift časové konstanty rotoru
• Změna odporu statoru v důsledku teploty
• Magnetické nasycení při vyšším zatížení
• Impedance dlouhého motorového kabelu a účinky EMI
Běžný vzor symptomů se objevuje, když systém funguje hladce, když je studený a lehce zatížený, ale později se stává méně stabilním, hlučnějším nebo nekonzistentním při vysoké teplotě nebo těžkém zatížení. Tyto situace často vedou buď k nedůvěře v řízení vektoru, nebo k přísnějším praktikám ladění a identifikace parametrů.
Praktiky ladění, které obvykle vedou k klidnějším instalacím
Stabilní instalace vektoru často sdílejí několik návyků, které nezní okouzlujícím způsobem, ale zabraňují dlouhým ladicím sezením později.
• Ověřte data motoru za skutečných podmínek vedení: délka kabelu, výstupní reaktory, uzemnění a uspořádání instalace ovlivňují odhad a EMI způsoby, které nastavení na lavici málokdy zachycují.
• Použití rotující autotune, když je to možné: statické ladění může být dobré pro ventilátory a čerpadla, ale vysokokroutící moment při nízké rychlosti často těží z rotující identifikace.
• Přizpůsobte šířku pásma řízení mechanice: příliš agresivní smyčky kroutícího momentu mohou vzrušit spojky, vůle a rezonance; mírně pomalejší, ale dobře utlumené chování často přináší lepší propustnost a méně rušivých výpadků.
Praktické pravidlo pro výběr režimu bez přemýšlení
Pokud je proces citlivý na kroutící moment při nízké rychlosti nebo očekává rychlé zotavení z kroků zatížení, řízení vektoru často snižuje počet nepříjemných překvapení později, i když úsilí při nastavení vzroste. Pokud proces toleruje pokles rychlosti a zřídka funguje blízko nulové rychlosti, skalární režimy často poskytují stabilnější každodenní chování s méně knoflíky, které může být špatně nastaveno.
Generace 4: DTC (Řízení přímého točivého momentu)
Řízení přímého točivého momentu odhaduje tok a točivý moment statoru v referenčním rámci statoru a vybírá stavy spínání střídače, aby udržel tok a točivý moment uvnitř hysterezních pásem. Protože se vyhýbá některým z vnořených struktur typických pro implementace FOC, může poskytnout velmi rychlou odpověď na točivý moment a silné odmítání rušení. V aplikacích, kde operátoři zaznamenávají každý úbytek točivého momentu jako výrobní vadu nebo procesní poruchu, může být tato reakční schopnost více uklidňující než krásně hladký vlnění.
Výhody běžně pozorované.
• Rychlá reakce na točivý moment během náhlých změn zatížení
• Silný točivý moment při nízké rychlosti, když je odhad spolehlivý
• Porovnání přímé struktury, která může robustně fungovat na vyšších výkonových úrovních.
Náklady a omezení, které vyžadují plánování.
• Kolísání točivého momentu a proměnná spínací frekvence
• Hysterezní chování může vytvářet slyšitelný hluk a pulzaci točivého momentu, která se výrazně vyznačuje v systémech s nízkou inercií nebo přesností.
EMI a složitost termálního designu: proměnné spínání komplikuje návrh filtrů a může zhoršit akustiku motoru, pokud není spravováno.
Závislost na kvalitě odhadu: slabost pozorovatele při blízko nulové rychlosti se může objevit, podobně jako u řízení beze senzorů, ačkoli implementace se u jednotlivých dodavatelů široce liší.
DTC často vyniká, když jsou transixty točivého momentu důležitější než ultra hladký točivý moment a kde je párování pohonu/motoru dimenzováno a integrováno s tímto očekáváním. V těžkém průmyslu je přitažlivost často méně o maximálních parametrech a více o zotavení z poruch způsobem, který zůstává konzistentní bez křehkého ladění.
Generace 5: Matricová AC–AC konverze
Matricový měnič převádí AC vstup přímo na AC výstup bez velké banky DC-link kondenzátorů. To mění osobnost systému: může zlepšit účiník vstupu, snížit objemné energetické skladovací komponenty a umožnit inherentně obousměrný tok energie. Současně mění modulační omezení, metody ochrany a požadavky na komutaci, což má tendenci zvyšovat koordinaci mezi řízením a výkonovým hardwarem.
Převod matic vyžaduje pečlivě načasované přepínání, aby se předešlo zkratu vstupních fází nebo přerušení induktivních proudových cest. Dosáhnout stabilního chování bez senzoru a silného točivého momentu při nízkých rychlostech obvykle vyžaduje vysoce přesné pozorovatele (flux, točivý moment, někdy rychlost), rychlé výpočty v reálném čase a sofistikovanou modulaci, která může kombinovat PWM s rozhodovací logikou podobnou hysterézi. Pokud je to provedeno správně, odezva točivého momentu může dosáhnout chování v měřítku milisekund, ale inženýrská pohodlná rezerva je často užší než u konvenčních měničů napětí (VSI), což může týmy učinit opatrnými, pokud výhody jasně nekompenzují přidanou složitost.
• Omezující faktory přenosového poměru napětí: prakticky maximální výstupní napětí je omezeno vzhledem k vstupu, což může zmenšit rezervu točivého momentu při vysokých rychlostech, pokud není systém navržen kolem toho.
• EMC a filtrování: odstranění DC spojení přesouvá zátěž filtrace a může zkomplikovat dodržování předpisů v elektricky hlučném prostředí.
• Kompromisy v spolehlivosti: odstranění elektrolytických kondenzátorů může zlepšit životnost v některých pracovních profilech, ale měnič zavádí složitější požadavky na spínání a ochranu, které mění místa, kde mohou nastávat selhání.
Maticové měniče jsou obvykle odůvodněny, když převládá obousměrný tok energie, kompaktnost nebo obavy o životnost kondenzátorů, a když lokalita může podporovat inženýrství a údržbu složitosti, která následuje. Hůře se obhajují, když jsou priority zaměřeny na rychlé nasazení, širší znalost servisních služeb nebo vysokou toleranci k nejistotě parametrů a „dostatečně dobrým“ údajům o motorech.
V průběhu těchto generací zůstává vzorec konzistentní: výkon se zlepšuje, jak se točivý moment a tok přesouvají z emergentního chování na výslovně regulované proměnné. Ústupkem je, že každý krok nahoru se obvykle více spoléha na modely, kvalitu snímání, disciplínu uvedení do provozu a mechanickou kompatibilitu. Pohon, který je teoreticky silnější, může stále zaostávat, když jsou údaje o motorech nesprávné, když mechanický systém zesiluje vlnění, nebo když provoz stráví čas poblíž slabé oblasti pozorovatele.
Vlastnosti VFD
VFD si obvykle získává svou pověst v měřeném chování, nikoli v jazykových brožurách. To, co obvykle rozhoduje debatu, často po několika dlouhých ránech spouštění před panelem, je, jak konzistentně pohon mění odezvu motoru během startování, změn rychlosti a provozu při částečné zátěži. To jsou momenty, kdy tradiční přístupy často ztrácejí energii, hladkost nebo životnost zařízení.
V každodenní inženýrské práci jsou výsledky více opakovatelné, když jsou elektrické výkon a očekávání procesů zpracovávány jako jedno designové vlákno (limity energetického systému, tepelné limity motoru a dynamika procesů provázané), spíše než jako dva paralelní kontrolní seznamy, které se setkávají pouze při uvedení do provozu.
Měkký start a nižší elektrické/ mechanické napětí
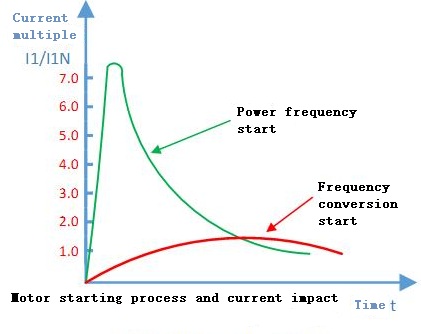
Vymezeným znakem VFD je řízené zrychlení, které se provádí koordinací napětí a frekvence během rampy. Při připojení napřímo obvykle přetížení leží v rozmezí přibližně ~5–7× jmenovitého proudu, a nevýhody se rychle projeví.
Typické vedlejší účinky při napojení napřímo:
• Pokles napětí
• Nežádoucí vypadnutí
• Opotřebení stykače
• Náraz na spojení/pás/ převodovku.
S rampou VFD zůstává startovací proud obvykle blíže k ~1.2–1.5× jmenovitému, i když skutečná čísla stále závisí na profilu zatížení, čase zrychlení a požadavcích na točivý moment. Když je tento vrchol proudu vyhnán, lidé na podlaze to obvykle pocítí, než někdo spočítá matematiku: méně překvapených pohledů na stav jističe, méně restartování během směny a klidnější řídicí skříň během startů v pondělních ránech.
Další zařízení také těží z měkčího elektrického profilu. Nižší přetížení snižuje špičkové napětí na transformátory, generátory a sdílené přívody a snižuje šanci, že jiná citlivá zatížení na stejném sběrnici zažijí krátkodobé podnapětí. Při odstraňování závad v terénu je to jedna z těch změn, které tiše snižuje frustraci: „náhodná“ vypadnutí přestávají být náhodná a údržba přestává honit přechodné symptomy, které měly kořeny v tvrdých startu.
Protože točivý moment lze řídit během zvyšování rychlosti, může pohon zabránit náhlému vrcholu točivého momentu, který často produkuje přímé spuštění. To se projevuje jako více předvídatelné mechanické chování, zvláště u strojů, které již týmu ukázaly trochu pokory.
Běžné mechanické výsledky, když je křivka točivého momentu dobře tvarována: delší životnost řemene; méně selhání spojení; snížené točivé oscilace v rotujících systémech.
V mnoha zařízeních není praktický rozdíl v tom, zda se zatížení spouští jednou, ale zda se spouští vždy stejným způsobem. Zatížení s vysokým počátečním třením, lepivým produktem nebo studenými ložisky často reaguje lépe, když je náběh nastaven úmyslně, nikoli náhodně. Stabilní a předvídatelné chování při spuštění zvyšuje důvěru během normálního provozu.
Zrychlovací náběh, který je příliš agresivní, může stále vytvářet špičky proudu a mechanické šoky. Příliš pomalý náběh může motor tlačit k přehřátí při nízké rychlosti, když je chlazení ventilátorem slabé nebo když je poptávka po točivém momentu vysoká.
Přístup k uvedení zařízení do provozu, který obvykle působí stabilněji (a snadněji se obhajuje později), je začít s konzervativním zrychlením, a poté jej zkrátit pouze v případě, že to proces opravdu přináší výhody, přičemž se sleduje malé množství signálů, které málokdy klamou:
Signály k sledování během ladění náběhu:
• Výstupní proud pohonu
• Teplota motoru (nebo tepelný model)
• Změny vibrací
• Konzistence opakovaného startu
Řízení širokého rozsahu a plynulosti rychlosti prostřednictvím variace frekvence
Další určující rys je řízení rychlosti bez mechanických úprav. Místo změny počtu pólů nebo přidání převodových stupňů, VFD mění frekvenci napájení. U indukčního motoru jsou synchronní rychlost a rychlost rotoru běžně vyjádřeny jako:
n₀ = 60f / P
n = 60f(1 − S) / P
Kde f je frekvence, P je počet pólů a S je prokluz. Variabilita f umožňuje plynulé přechody rychlosti při zachování prokluzu v rozsahu, který může řídicí systém řídit. V praxi to znamená stabilnější chování procesu: dopravníky mohou sladit rychlosti nahoru/dolů, čerpadla mohou sledovat poptávku a ventilátory mohou udržovat tlakové úrovně bez cyklování zastavení a spuštění, které opotřebovává jak hardware, tak trpělivost.
Bod, který se někdy přehlíží, dokud pro něj odpad nebo dodatečné práce nezpůsobí bolavě zřejmé, je, že plynulé řízení rychlosti není pouze otázkou pohodlí. Snížená variabilita procesu často snižuje potřebu zásahů operátorů a může omezit ztráty kvality, které se na energetickém měři vůbec neobjeví.
Ovládání VFD se nejlépe osvědčuje, když proces tráví skutečný čas mimo jmenovitou rychlost. Místo běhu na plnou rychlost a vyhazování přebytečné energie prostřednictvím škrcení nebo tlumení, může systém pracovat blíže tomu, co zatížení skutečně vyžaduje v daném okamžiku. To obecně zlepšuje stabilitu a snižuje opotřebení řídicích prvků, které by jinak trávily svůj život bojováním s strojem.
Komponenty, které často vykazují méně opotřebení, když je rychlost používána pro řízení:
• Škrtiče
• Vstupní klapky
• Obvykle dráhy
• Mechanické brzdy používané k měření
Prokluz S je více než proměnná v rovnici; odráží to, jak motor vyvíjí točivý moment při zatížení. Ovládání pohonu spravuje prokluz nepřímo koordinací napětí a frekvence, aby motor mohl vyprodukovat točivý moment, aniž by tahal nadměrný proud.
Při uvedení do provozu pomáhá sledovat poptávku po točivém momentu v celém rozsahu rychlostí, nejen na pohodlném bodě střední rychlosti. Nastavení, která se zdají být v pořádku při střední rychlosti, mohou být zklamáním blízko vrcholů točivého momentu při nízké rychlosti, a toto zklamání se obvykle objeví v nejméně vhodném čase, během studených startů, těžkých šarží nebo po narušení procesu.
Vysoký potenciál úspor energie u zatížení s proměnlivým točivým momentem
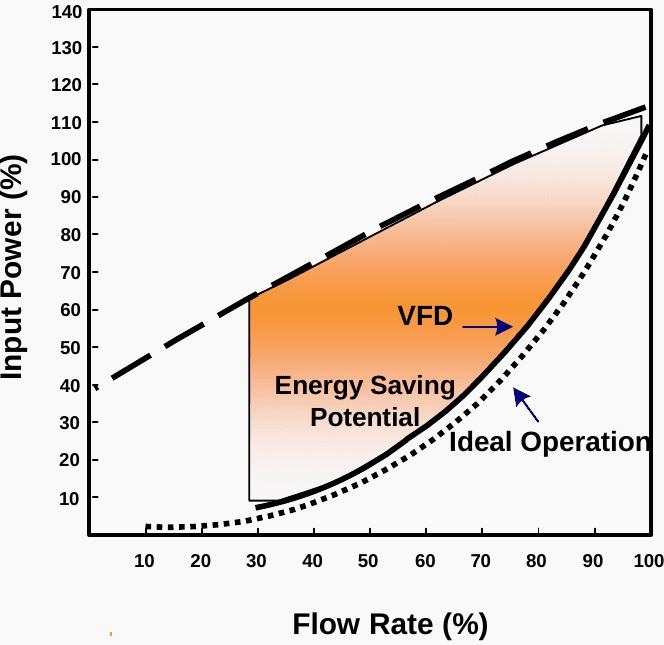
Snížení energie bývá nejsilnější u zatížení s proměnlivým točivým momentem, jako jsou ventilátory a odstředivá čerpadla. Zákony afinity vysvětlují tvar úspor:
Vztahy afinity:
• Průtok ∝ Rychlost
• Tlak/Hlava ∝ Rychlost²
• Výkon ∝ Rychlost³
Protože výkon se škáluje se třetí mocninou rychlosti, i mírné snížení rychlosti může vyprodukovat velké úspory výkonu. To je důvod, proč škrty a vstupní klapky často zaostávají za redukcí rychlosti, když poptávka kolísá: škrcení ztrácí energii jako ztrátu tlaku, zatímco řízení rychlosti snižuje množství energie, které systém potřebuje generovat na prvním místě.
V provozních prostředích je rozdíl obvykle viditelný na více než jednom místě, což je uspokojivé velmi praktickým způsobem, protože to posiluje, že řídicí strategie dělá to, co model předpověděl:
Běžné provozní znaky snížené poptávky při nižší rychlosti:
• Nižší odběr kW
• Tišší provoz
• Méně tepla v systému
• Méně servisních zásahů na ventily a klapky
Z profesionálního hlediska se úspory, které přetrvávají v průběhu času, obvykle získávají tím, že se VFD chápe jako součást řídicí strategie (nastavené body, limity a zpětná vazba), nikoli jako manuální ovládací knoflík rychlosti, který se pohybuje podle návyků a preferencí při přepínání směn. Když je pohon integrován s jasnou logikou, řízením tlaku, průtoku nebo teploty s ochrannými prvky, výsledky obvykle zůstávají stabilní, i když se operátoři mění.
Mnoho systémů pracuje při částečném zatížení většinu svých provozních hodin. VFD přizpůsobuje vstupní výkon motoru skutečné poptávce, místo aby nuceně provozoval maximální rychlost a „řízení dolů“ se ztrátami. To často snižuje spotřebu energie a zároveň zmírňuje mechanické zatížení, protože systém funguje s menší turbulencí, menšími ztrátami z omezení a méně rychlými oscilačními kontrolami, které dráždí vybavení i operátory.
Jednoduchým způsobem, jak ověřit úspory, je porovnat skutečný výkon (kW) v stabilizovaných pracovních bodech před a po zavedení řízení rychlosti, namísto spoléhání se pouze na údaje z výrobního štítku. Tato zvyklost měřit jako první obvykle zabraňuje nepříjemným konverzacím později, zejména když křivky systému, minimální omezení průtoku a doladění řízení posunují výsledek.
Faktory v terénu, které běžně odchylují výsledky od odhadů podle učebnice:
• Tvar křivky systému
• Minimální průtok a hlava
• Umístění senzorů
• Doladění PID
• Chování bypassu nebo recirkulace
Charakteristiky VFD
Definující charakteristiky VFD lze shrnout do tří výsledkově orientovaných témat, vyjádřených stejným jazykem, který lidé používají, když se rozhodují, zda instalace „fungovala“:
(1) Měkčí rozběhy s nižším nárazovým proudem a menším elektrickým/mechanickým napětím.
(2) Hladké, širokopásmové řízení rychlosti pomocí variace frekvence s kontrolovaným skluzovým chováním.
(3) Silné snížení energie u zátěží s proměnlivým točivým momentem, protože výkon rychle klesá, když se snižuje rychlost.
Když jsou tato témata aplikována s praktickým doladěním a procesně uvědomělou logikou řízení, výsledky mají tendenci být konzistentní přes směny a sezóny, což je často to, co týmy skutečně chtějí: méně překvapení, méně událostí zastavení linky a výkon, který zůstává stabilní po odchodu montážního týmu.
Závěr
Výkon VFD závisí na mnohem více než jen na změně rychlosti motoru. Stabilní provoz vyžaduje pečlivou koordinaci frekvence, napětí, regulace proudu, parametrů motoru, tepelných podmínek a chování zatížení. Různé strategie řízení vyvažují odezvu točivého momentu, účinnost, stabilitu a dynamický výkon na základě potřeb aplikace. Jak průmyslové systémy vyžadují vyšší účinnost, přesnost a spolehlivost, technologie VFD se stále vyvíjí prostřednictvím vylepšených řídicích metod, ochranných systémů a konstrukcí výkonové elektroniky, které podporují moderní aplikace poháněné motory.
Často kladené otázky [FAQ]
1. Proč VFD reguluje napětí společně s frekvencí místo toho, aby měnil pouze frekvenci?
VFD upravuje jak napětí, tak frekvenci, aby udržel magnetický tok motoru v stabilním provozním rozsahu. Pokud frekvence klesne bez správné úpravy napětí, tok slábne a schopnost točivého momentu rychle klesá, zejména při nízké rychlosti. Pokud zůstává napětí příliš vysoké pro provozní frekvenci, motor může odebírat nadměrný magnetizující proud, což zvyšuje teplo a zatěžuje izolační systém. Koordinace napětí a frekvence umožňuje pohonu udržovat použitelný točivý moment, stabilní chování proudu a předvídatelný tepelný výkon napříč měnícími se podmínkami zatížení.
2. Proč mnoho problémů s VFD sledovaných k motorům ve skutečnosti pochází z vstupní strany pohonu?
Mnohé problémy, které jsou přičítány motorům, jsou ve skutečnosti způsobeny tím, jak se fáze usměrnění interaguje s elektrickým zdrojem. Standardní usměrňovače diodové odebírají nesenové proudy, což zavádí harmonické kmitočty a může destabilizovat slabé napájecí systémy s vysokou impedancí zdroje. Symptomy jako časté výpadky, zahřívání transformátorů, nestabilita napětí nebo přerušované závady obvykle vyplývají z vztahu mezi pohonem a přicházejícím napájecím systémem spíše než z motoru samotného. Komponenty na vstupní straně, jako jsou lineární reaktory, DC-linkové tlumivky a EMI filtry, jsou běžně přidávány pro stabilizaci těchto interakcí.
3. Proč jsou kondenzátory DC-link považovány za jedny z nejvíce namáhaných komponentů uvnitř VFD?
Kondenzátory DC-link absorbuji špičkový proud, stabilizují napětí na sběrnici a dočasně ukládají energii během rychlých změn zatížení. Časem kontinuální tepelný stres a expozice špičkovému proudu postupně degradují výkon kapacity. Pohon může pokračovat v provozu i při zhoršování kapacity, což může způsobit, že je na první pohled obtížné problém zaznamenat. Nakonec se pohon stává citlivějším na poklesy napětí, regenerační události a přechodné změny zatížení, což často vede k nejasným výpadkům nebo nestabilnímu chování před tím, než dojde k úplnému selhání kondenzátoru.
4. Proč zvyšování nosné frekvence PWM zlepšuje akustiku motoru, ale zvyšuje tepelný stres uvnitř pohonu?
Vyšší PWM nosná frekvence produkuje hladší motorový proud a snižuje slyšitelné šumy posouváním přepínacích harmonických nad nejvíce znatelný slyšitelný rozsah. Nicméně, každá přepínací událost generuje ztráty uvnitř IGBT a napájecí elektroniky. Jak se zvyšuje přepínací frekvence, ztráty invertoru a vnitřní zahřívání se výrazně zvyšují. To vytváří praktický inženýrský kompromis mezi tišším provozem motoru a udržením přijatelných teplotních rezerv uvnitř VFD. V mnoha instalacích ladění nosné frekvence přímo ovlivňuje dlouhodobou spolehlivost a požadavky na chlazení skříně.
5. Proč běžně regenerační zátěže vyvolávají poruchy DC přepětí při deceleraci?
Když se motor zpomaluje nebo je poháněn samotnou zátěží, začíná fungovat jako generátor a vrací energii do DC sběrnice. Pokud regenerovaná energie vstupuje do sběrnice rychleji, než může být rozptýlena nebo vrácena do sítě, DC napětí rychle stoupá a spouští ochranu proti přepětí. Toto chování je silně ovlivněno setrvačností zátěže a agresivitou zpomalení. Mnohé problémy s přepětím jsou vyřešeny prodloužením ramp zpomalení nebo správným dimenzováním brzdných odporů a regeneračního hardwaru tak, aby odpovídaly skutečné mechanické energii uložené v systému.
6. Proč má řízení vektoru obvykle lepší výkon než skalární V/Hz řízení při nízké rychlosti a během změn zátěže?
Skalární V/Hz řízení reguluje chování motoru nepřímo udržováním přibližného poměru napětí k frekvenci, což dobře funguje pro předvídatelné zátěže, jako jsou ventilátory a čerpadla. Řízení vektoru, zvláště řízení orientované na pole (FOC), reguluje komponenty proudu produkujícího točivý moment a magnetického toku odděleně. To umožňuje pohonu reagovat mnohem rychleji na změny zátěže a udržovat silnější točivý moment i blízko nulové rychlosti. Rozdíl se stává zvlášť znatelným v aplikacích zahrnujících rychlou akceleraci, vysoký startovní točivý moment nebo citlivé požadavky na regulaci rychlosti.
7. Proč se může řízení s vektorem stát nestabilním po změnách teploty nebo výměně motoru?
Řízení vektoru silně závisí na přesném odhadu parametrů motoru. Odpor rotoru, odpor statoru, chování magnetického nasycení a impedance kabelu se mohou během skutečných provozních podmínek měnit. Změny teploty a náhrady motoru často mění tyto parametry natolik, že snižují přesnost odhadu, zvláště při nízké rychlosti, kde se modely pozorovatelů stávají citlivějšími. Systémy, které zpočátku fungují hladce, mohou později vykazovat hluk, nestabilní odezvu točivého momentu nebo nekonzistentní regulaci rychlosti, pokud model motoru již neodráží skutečné elektrické chování.
8. Proč je automatické ladění považováno za jeden z nejdůležitějších kroků během uvedení VFD do provozu?
Automatické ladění vyrovnává kontrolní model pohonu se skutečnými elektrickými charakteristikami motoru místo spoléhání se pouze na údaje z typového štítku. To zlepšuje regulaci proudu, odezvu točivého momentu, odhad prokluzu a chování při nízké rychlosti. V mnoha instalacích je automatické ladění bodem, kde systém přechází od pouhého fungování k hladkému a předvídatelnému provozu. Rotující procedury automatického ladění jsou zvlášť cenné pro aplikace vyžadující silný točivý moment při nízké rychlosti nebo přesnou odezvu na přechody, protože zachycují chování motoru za skutečných provozních podmínek.
9. Proč VFD výrazně snižují spotřebu energie na čerpadlech a ventilátorech ve srovnání s metodami škrcení?
U odstředivých čerpadel a ventilátorů spotřeba energie sleduje affinity zákony, kde se výkon mění přibližně se třetí mocninou rychlosti. To znamená, že i mírné snížení rychlosti může přinést značné úspory energie. Tradiční metody škrcení nutí motor běžet na plnou rychlost, zatímco mechanicky omezují tok, což plýtvá energií jako ztrátou tlaku. VFD místo toho přímo snižuje rychlost motoru, takže systém produkuje pouze potřebný tok nebo tlak, čímž snižuje poptávku po energii na svém zdroji místo toho, aby rozptyloval přebytečnou energii.
10. Proč moderní technologie VFD s rychlým přepínáním zvyšují obavy o EMI a proudy ložisek?
Moderní PWM pohony, zejména ty, které používají přepínací zařízení SiC nebo GaN, generují extrémně rychlé napěťové přechody s vysokým dV/dt. Tyto rychlé hrany mohou vytvářet běžné režijní napětí, elektromagnetické rušení a bludné proudy, které procházejí ložisky motoru. Pokud jsou postupy uzemnění, stínění kabelů, filtrace a spojování špatně provedeny, může to mít za následek předčasné opotřebení ložisek, hlučné senzory, nestabilitu komunikace nebo napěťový stres izolace. V aplikacích s vysokým výkonem se kvalita kabeláže a uzemnění stává často stejně důležitou jako kontrolní algoritmus sám.
Související blog
-
Kolik nul v milionu, miliardách, bilionu?
![Kolik nul v milionu, miliardách, bilionu?]()
2024/07/29
Milion představuje 106, snadno pochopitelná postava ve srovnání s každodenními předměty nebo ročními platy. Miliarda, což odpovídá 109, z... -
Datový list IRLZ44N MOSFET, obvod, ekvivalent, pineout
![Datový list IRLZ44N MOSFET, obvod, ekvivalent, pineout]()
2024/08/28
IRLZ44N je široce používaný N-kanálový mosfet.Je známý svými vynikajícími schopnostmi přepínání, je vysoce vhodný pro mnoho aplikací,... -
Teplota baterie je příliš nízká, nabíjení se zastavilo.Jak to opravit?
![Teplota baterie je příliš nízká, nabíjení se zastavilo.Jak to opravit?]()
2024/10/6
Problémy s nabíjení baterií mobilního telefonu jsou běžné, ale lze je efektivně spravovat.Teplota hraje velkou roli v účinnosti baterie, pr... -
BC547 Transistor Comprehensive Guide
![BC547 Transistor Comprehensive Guide]()
2024/07/4
Tranzistor BC547 se běžně používá v různých elektronických aplikacích, od základních signálních zesilovačů po komplexní obvody oscil... -
Komplexní průvodce pro SCR (usměrňovač ovládaného křemíkem)
![Komplexní průvodce pro SCR (usměrňovač ovládaného křemíkem)]()
2024/04/22
Křesťánové usměrňovače (SCR) nebo tyristory hrají klíčovou roli v technologii Power Electronics kvůli jejich výkonu a spolehlivosti.Tento ... -
LR621, SR621SW, 364, Ekvivalenty a náhrady baterie AG1
![LR621, SR621SW, 364, Ekvivalenty a náhrady baterie AG1]()
2024/07/15
Klapivé baterie LR621 a SR621SW převládají v kompaktních elektronických zařízeních, jako jsou hodinky, malé hračky, kalkulačky a odlehlé ... -
Základy obvodů op-amp.
![Základy obvodů op-amp.]()
2023/12/28
Ve složitém světě elektroniky nás cesta do jejích tajemství vždy vede k kaleidoskopu komponent obvodů, jak vynikající, tak komplexní.V srd... -
Porovnání rozdílů a aplikací NMOS a PMOS
![Porovnání rozdílů a aplikací NMOS a PMOS]()
2024/11/15
Pochopení rozdílů mezi tranzistory NMO a PMOS je důležité při navrhování účinných obvodů.NMOS (N-typ-typ-oxid-Semiconductor) a PMOS (p-ty... -
Kompletní průvodce multiplexery a jejich roli v digitálních systémech
![Kompletní průvodce multiplexery a jejich roli v digitálních systémech]()
2025/09/20
Multiplexery jsou komponenty v digitálních systémech, které jsou navrženy tak, aby nasměrovaly více vstupních signálů do jediného výstupn... -
CR2450 vs CR2032 Porovnání: Vše, co potřebujete vědět
![CR2450 vs CR2032 Porovnání: Vše, co potřebujete vědět]()
2025/09/15
Blatonobílé baterie jako CR2450 a CR2032 Power Mnoho každodenní elektroniky, od hodinek a dálkových ovladačů po lékařská a průmyslová za...




Hot Parts
- F921A335MPA
- UCC28061D
- NT68628FG
- LTC4054LES5-4.2#TRMPBF
- 12101A681GAT2A
- C1005X7R1E153K
- AT89C51-24PI
- ISL6565ACV-T
- PMGD400UN
- PIC18F6680-I/PT
- RT1206BRE0747KL
- M30302GAP-A12FP#U5
- BAS40-05
- MCHC908QT4CDWE
- TLC04IDR
- RMLV0408EGSB-4S2#AA1
- DAC8840FS
- BQ32002DR
- N1159NC420
- SN74LV00ARGYR
- PIC10F322-I/OT
- MIG20J902H
- MN101C117BS
- GRM1555C1E1R8BA01D
- CC1206JRNPOABN470
- PT2389-S
- GRM0225C1E4R9CA03L
- MC56F82746V
- TPS5100IPWR
- GAL26CV12B-20LJ
- HD62MD150A02TEL
- STM32F427IIT6
- XRD8785AIDTR-F
- STH310N10F7-2
- TLV320AIC24IPFB
- IRFL014NTRPBF
- T495B107M006ZTE400
- VI-J0P-CX
- P0724UCMC
- X28C512JIZ-15
- 74VHCT00A
- H28U78222MMR
- HY5DW573222F-28
- SF-2581VB1-SDC
- VT1105SF
- XC7336-7PC44C
- LM3530TME-40
- M52350FP
- S912ZVMC64F3WKHR
- 1812AA821KAT1A