- Čeština
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
PMIC Vysvětleno: Funkce, Typy a Aplikace
Katalog
Zkoumání PMIC
PMIC (integrovaný obvod pro správu napájení) je specializovaný IC, který přijímá jedno nebo více napájecích vstupů a produkuje více regulovaných, řízených napájecích lišt pro různé zátěže na desce. Tyto zátěže často zahrnují procesory, paměti, RF bloky, senzory a různé periferní zařízení.
Místo rozptýlení diskrétních regulátorů a IC dozorů po návrhu, PMIC je konsoliduje do jednoho koordinovaného správce napájecí domény. Pro mnoho týmů přináší tato konsolidace také určitou klid duše během uvedení do chodu, protože je jedno místo, kam se podívat, když se lišty chovají podivně.
Procesory, paměti, RF bloky, senzory a další zátěže.
Funkční rozsah
U skutečných produktů příspěvek PMIC jde daleko za pouhou konverzi napětí. Praktický přínos se projevuje, když se chová jako koordinátor napájení na úrovni systému, který spojuje několik odpovědností, které přirozeně interagují během spuštění, zatížení runtime a podmínky závady.
Konverze
PMIC může kombinovat různé typy regulátorů, aby bylo možné optimalizovat napájecí lišty zaměřené na efektivitu a napájecí lišty citlivé na šum samostatně. V praktických návrzích je hlavní obavou často ne generování požadovaného napětí, ale udržení stabilního napětí během změn zátěže, událostí spuštění a dalších náročných provozních podmínek.
Buck regulátory, boost regulátory, buck-boost regulátory a LDO regulátory.
Lišta, která vypadá v pořádku při stabilní zátěži, se může pod reálnými profily viditelně stresovat. Efektivita, ripple, přechodná odezva a tepelná rezerva jsou běžně pečlivě zkoumány, když jsou testovány CPU burst proudy, RF přenosové pulzy nebo špičky vzorkování senzorů za reálných provozních podmínek.
CPU bursty, RF přenosové pulzy a špičky vzorkování senzorů.
Distribuce
Poté, co jsou lišty generovány, PMIC často určuje, jak jsou sdíleny, spínány a izolovány. To je místo, kde se návrh může cítit buď robustní nebo křehký, zvláště během horké výměny, poklesu napájení a událostí souvisejících s kabelem. Když je distribuce zvládnuta promyšleně, proud zatékání je řízen, zpětné napájecí cesty jsou omezeny a závada je méně pravděpodobná, že se rozšíří do celkového kolapsu desky.
Povolení lišt, spínače zatížení, omezení proudu a ideální dioda ORing pro vícestandardní vstupy.
Detekce a dozor
Většina PMIC integruje dozor, který nepřetržitě sleduje zdraví lišt a poskytuje signály, které firmware a hardware mohou interpretovat. V laboratoři tyto funkce rychle přestávají působit jako příjemné doplňky a začínají se cítit jako rozdíl mezi čistou ladící seancí a dnem stráveným sledováním resetu, který se odmítá reprodukovat na požádání.
Monitorování podnapětí, monitorování přepětí, detekce nadproudu, tepelná detekce a signálování o dobrém napájení.
Jedna lekce, která se obvykle drží zkušených týmů při uvádění do provozu, je, že prahy dobrého napájení a načasování deglitche musí být jednoznačné. Když jsou vágní nebo špatně sladěné se systémem, výsledkem jsou často falešné resety nebo "ghost boot" selhání, která se objevují pouze v teplotních krajnostech, na určitých bateriích nebo po sekvencích rychlých restartů.
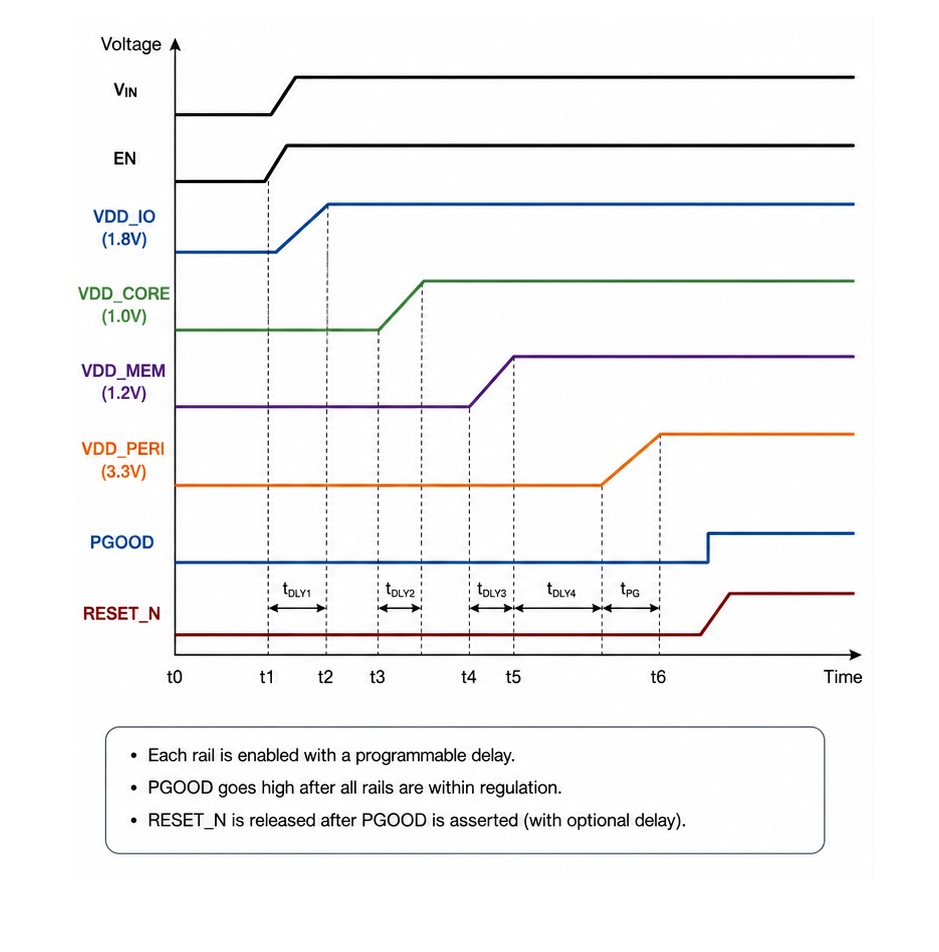
Řízení a sekvenování
PMIC často zahrnuje mechanismy pro tvarování toho, jak se napájecí větve zvedají, klesají a koordinují navzájem. Tyto detaily se projevují jako konkrétní výsledky: zda systém bootuje opakovaně, zda komponenty zažívají vyhnutelný stres a zda deska se po chybě vrátí do známého stavu.
Sekvenování, soft-start, tvarování nástupu, cesty vybití a konfigurovatelné načasování mezi větvemi.
Digitální systém obvykle nevyžaduje pouze správná stálá napětí; také očekává, že se tyto větve dostávají v určitém pořadí a v rámci ohraničených časových vztahů. Pokud jsou sklony příliš strmé, příliš pomalé nebo jednoduše špatně seřazené, mohou interní struktury a domény skončit v nedefinovaných podmínkách, které jsou vzácně přerušované, zejména kolem chování uchovávání SRAM a rychlého uvádění do provozu rozhraní.
Interní ESD struktury, domény uchovávání SRAM a rychlá rozhraní.
Co obvykle formuje výsledky v reálných návrzích
Když tým přechází z blokového schématu na fungující prototyp, výběr a konfigurace PMIC často uspěje nebo selže na základě provozních detailů spíše než na základě marketingových specifikací. V subtilních problémech jsou ty, které vytvářejí tlak na harmonogram, protože se objevují pozdě a málokdy se projevují jako jednoznačná, zřejmá příčina.
Vyrovnávání se s rychlými přechody a dynamickými zátěžemi
Moderní procesory a RF sekce mohou vyžadovat velké změny proudu v časových měřítkách mikrosekund. PMIC může na papíře vypadat zcela přijatelně a přesto se může objevit pokles, přežehnutí nebo kolísání, jakmile se kontrolní smyčka, kompenzační přístup, výstupní síť a parazitická PCB nutí interagovat v reálném uspořádání.
Pokles, přežehnutí a kolísání.
Týmy, které testují přechodovou odezvu v raném stádiu, často tak činí, protože pocítily bolest z pozdního odhalení. Brzká validace může snížit pravděpodobnost nepříjemného cyklu redesignu zahrnujícího induktory, výstupní kondenzátory, kompenzační komponenty nebo dokonce samotnou volbu PMIC.
Induktory, kondenzátory, kompenzační komponenty a samotný PMIC.
Sekvenování jako systémová smlouva, nikoliv pohodlí
Napájecí sekvenování funguje nejlépe, když je považováno za smlouvu v rámci požadavků na křemík, předpokladů firmwaru a chování desky. Když rychlosti nástupu a časy dobrého napájení odchylují od toho, co očekává datasheet procesoru, nebo co firma implicitně předpokládá, obvykle se objevují přerušované problémy s bootováním.
Požadavky datasheetu procesoru a očekávání firmwaru.
Co činí tyto problémy obzvlášť frustrujícími, je jejich tendence zmizet za příznivých podmínek na stole a vrátit se během teplotních extrémů, horkého připojení baterií nebo okrajových podmínek napájení. V těchto prostředích deterministické sekvenování a předvídatelné resetovací chování snižují překvapení a zkracují cykly debugu.
Teplotní krajnosti, události horkého připojení baterií a podmínky podobné brownoutu.
Chování ochrany jako páka pro provozní dobu a náklady na služby
Limity nadproudu, tepelná ochrana a ochrany UV/OV jsou často diskutovány v jazyce bezpečnosti, ale nasazené produkty je zažívají jako funkce dostupnosti. PMIC, který elegantně omezuje proud, hlásí závady s dostatečnou jasností, aby byly proveditelné, a zotavuje se kontrolovaným způsobem, může zabránit tomu, aby se drobné selhání periferního zařízení proměnilo v celkové selhání systému a vznik podpůrného ticketu.
Ochranné mechanismy: Ochrana proti nadproudu, tepelná ochrana, ochrana proti podnapětí a ochrana proti přepětí.
Přínosy spolehlivosti systému: Elegantní omezování proudu, hlášení závad a kontrolované zotavení.
Je často přesnější, a pravděpodobně užitečnější během návrhových kompromisů, přemýšlet o PMIC jako o součásti architektury spolehlivosti systému než jen jako o měniči napájení. Návrhy, které stárnou dobře, obvykle vybírají PMIC na základě toho, jak konzistentně vynucuje předvídatelné stavy napájení napříč normálním provozem, zpracováním závad a přechody.
Když je tento pohled brán vážně, detaily, které jsou snadno přehlíženy během plánování, začínají vyznívat jinak během integrace. Chování vybití větve, integrita signálu dobrého napájení a telemetrie závad se stávají vlastnostmi, které oddělují zařízení, které se pouze zapne v laboratoři, od zařízení, které se čistí, opakovaně a předvídatelně spouští v terénu, aniž by požadovalo, aby inženýrský tým měl štěstí.
Kategorie PMIC
PMIC často označují hlavní funkcí, přičemž při dodávce hardwaru se obvykle chovají jako kompaktní, koordinovaný subsystém napájení spíše než jako komponenta pro jednoúčelové použití. Praktický způsob, jak třídit typy PMIC, je zaměřit se na (a) co regulují, (b) co omezují nebo vynucují a (c) co spojují, odpojují nebo aktivně řídí. Z pohledu uvedení systému do provozu je dělící linie, která se neustále objevuje, méně o lineárním versus spínacím a více o tom, zda byl PMIC navržen tak, aby spravoval interakci mezi napájecími linkami při měnící se zátěži. Když je tato interakce pečlivě řízena, desky se cítí klidněji během stresových testů; když není, stejný design může vypadat skvěle na benchovém zdroji a stát se náladovým v plně sestaveném produktu.
Primární funkční skupiny
Tyto bloky generují napájecí linky, nastavují pracovních bodů a absorbují změny v podmínkách vstupu. Obvykle pokrývají všechno od klidových linek s nízkým proudem až po digitální domény s vysokým proudem.
• Lineární regulace (LDO)
• Spínací regulace (buck, boost, buck-boost, inverze, nabíjecí čerpadla)
• Přední konverze a předregulace (AC/DC adaptéry, USB-PD sink fáze, automobilové předregulátory na některých platformách)
Tyto bloky formují, jak se napájení může chovat tím, že definují prahy, sledují hranice a reagují na závady. Nemusí dodávat watty, ale často rozhodují, zda systém selže čitelně nebo mysteriózně.
• Napěťové reference a prahové napětí
• Dozorce, monitory a srovnávací okna
• Generování resetů, watchdog časovače a detekce brownoutu
• Sekvenování, sledování a reakce na závady (UV/OV, přetížení, tepelná reakce)
Tyto bloky určují, kde se energie pohybuje, kdy je izolována a jak jsou řízeny externí zátěže. V reálných návrzích jsou místem, kde se hraniční případy, horké zapojení, pokles kabelu a závady příslušenství nejprve objevují.
• Správa napájecí cesty
• Spínače zátěže a eFuses
• Nabíjení baterií
• Napájecí linky a ovladače související s displejem
• Ovladače hradel MOSFET
Typy regulace / konverze
LDO jsou běžně vybírány, když jsou žádoucí nízký šum výstupu, jednoduchý návrh a rychlé chování při malých signálech. Objevují se často na RF blocích, audio napájeních, precizních senzorech a napájeních souvisejících s referencí ADC, kde mohou ripply přecházet na měřitelnou ztrátu výkonu.
Teplo je často omezeným faktorem v výkonu regulátorů. Jak se zvyšuje rozdíl napětí mezi vstupem a výstupem nebo roste proud zátěže, může se rozptyl výkonu a teplota stát důležitějšími než elektrické specifikace přesnosti.
Napájecí linka, která se jeví jako stabilní během otevřeného benchového testování, může vyvinout významné problémy s ohřevem uvnitř uzavřených systémů nebo vysokoteplotních prostředích, kde je průtok vzduchu a tepelné rezervy sníženy.
Buck měniče nesou velkou část zátěže pro efektivní základní napájení: aplikační procesory, DSP, DDR napájení a další digitální domény s vysokým proudem. V praxi se mohou dvě desky používající stejný buck chovat velmi odlišně v závislosti na režimu řízení, provozních režimech při nízké zátěži a rozložení řízených parasitických vlivů.
• Přístup řízení (napěťový režim, proudový režim, hysteretický, konstantní doba sepnutí)
• Chování při nízké zátěži (PFM, vynechávání pulsů, nucené PWM)
• Přechodová reakce versus výstupní ripplové kompenzace
• EMI postoj (možnosti rozšířeného spektra, volby spínací frekvence, citlivost rozložení)
Detail, který má tendenci ostřejšímu posuzování návrhu, je realita profilu zátěže. Měnič, který vypadá výborně při 2 A, může většinu svého života strávit při 20–200 mA, kde dominují režimové přechody, ztráty nabíjení hradla a režie spínání. Porovnání pouze hodnot efektivity při špičce může vést k tomu, že životnost baterie v reálném provozu se zhorší více, než se očekávalo na základě počátečních odhadů.
Boost měniče se obvykle aplikují, když musí cílová napájecí linka překročit zdroj, běžné příklady zahrnují generování 5 V z jednonabíjecí baterie, vytváření bias napájecích linek pro displej nebo napájení LED řetězců. Buck-boost topologie jsou favorizovány, když může vstup překračovat nad a pod požadovaný výstup, například udržování stabilní napájecí linky systému napříč celou křivkou vybití baterie.
Tyto měniče často rozplétají bolest hlavy na úrovni systému, jako je udržování stabilní 5 V domény, zatímco baterie klesá, ale toto uvolnění přichází se složitějšími pohyblivými částmi: složitostí kompenzace, chováním limitu proudu spínače a vedeným EMI, které může být překvapivě citlivé na geometrii desky a podmínky kabelu.
V telefonech a malých modulech IoT je AC/DC brick běžně mimo produkt, přičemž však přední jednání a ochrana vstupu čím dál více přistávají uvnitř zařízení. I když technický list tyto funkce propaguje jako funkce USB namísto funkcí PMIC, silně utvářejí velikost následného měniče, rozložení tepla a nejhorší případ stresu.
• USB-PD detekce a podpora jednání
• Omezování vstupního proudu a řízení náběhu
• Ochrana proti přepětí pro USB příslušenství a adaptéry
Přesnost podpůrných bloků
Odkazy ukotvují přesnost pro ADC, DAC a komparátorové prahy. V produktech s mísením signálů jsou opakovaně důležité detaily jako chování driftu, hustota šumu a PSRR v relevantním frekvenčním rozsahu. Může se to zdát protichůdné, ale malé množství referenčního šumu se může projevit jako měřitelný jitter, chyba senzoru nebo nejasnost prahu, jakmile je vynásobeno reálným zesílením a filtračními volbami.
Dohledové obvody sledují napájecí linky na podnapětí, přepětí a porušení sekvenování. V systémech s více napájecími linkami pomáhají vyhnout se polovičním aktivním stavům, kdy jedna doména zahajuje činnost, zatímco jiná doména je pozadu, ve stavu pod napětím nebo kolísá.
Z hlediska spolehlivosti robustní sledování obvykle snižuje typy přerušovaných prostorových vratek, které frustrují všechny: problémy, které se objevují pouze během studených startů, při spuštění s nízkou baterií, rychlém připojení za chodu nebo na okrajových kabelech, které nikdy nebyly v „šťastném“ režimu laboratoře.
Sekvencování je více než napájecí linka A, poté napájecí linka B. Stává se diskusí o tolerancích časování, strmostech náběhu, vztazích resetu a o tom, co systém dělá, když napájecí linka zmešká svůj časový slot.
Dokumentace SoC často specifikuje závislosti IO-před-jádrem, omezení školení paměti a přesné časování odvolání resetu. PMIC s programovatelným sekvencováním a kontrolovanými rampami mohou snížit externí spojovací logiku a udělat uvádění do provozu méně jako hádání, zejména když desky rychle iterují a malé změny časování mohou ušetřit dny ladění.
Funkce Power-Path a řízení
Logika napájecí cesty rozhoduje, zda systém běží z USB, baterie, nebo kombinace obojího, a ovlivňuje, co se děje během přechodů.
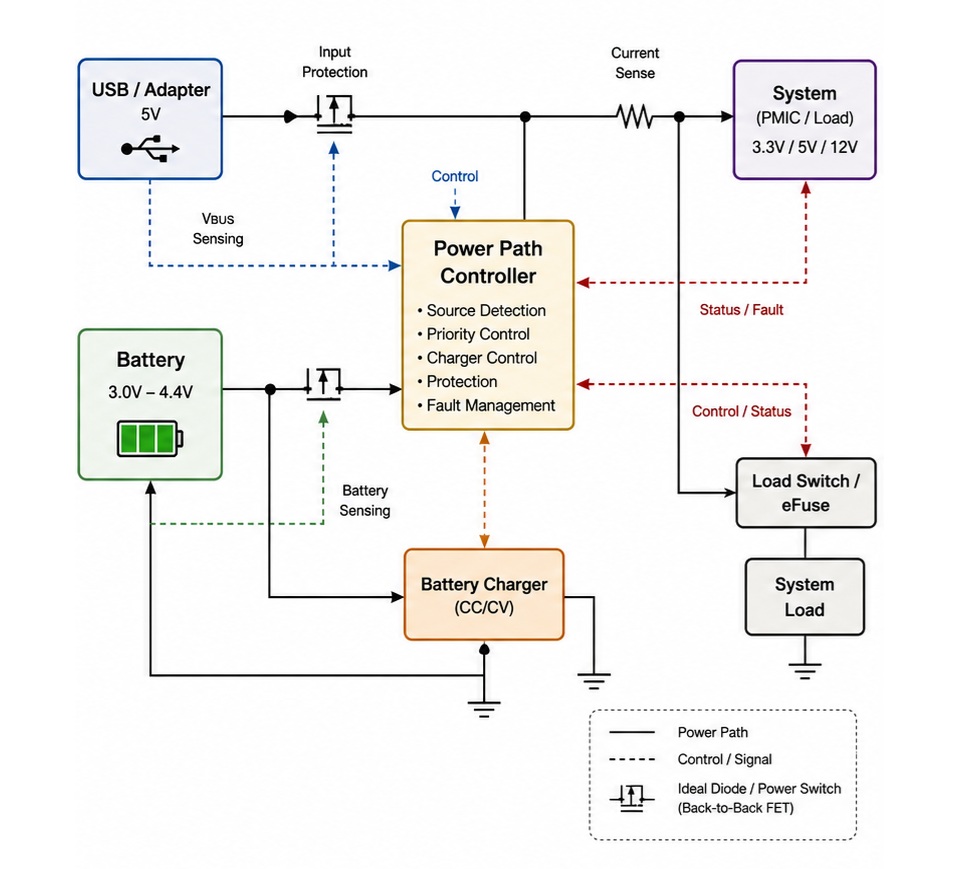
• Bezproblémové přepínání (omezování poklesů, které spouštějí reset)
• Omezování vstupního proudu pro USB/adaptéry a dodržování předpisů
• Chování ideální diody ke snížení zpětného proudu
Opakovanou pastí ze skutečného světa je podceňování odporu v kabelech, konektorech a ochranných prvcích. Během rychlého přechodu se PMIC může chovat přesně podle návrhu a systém může stále klesnout, protože výše uvedená cesta se snižuje více, než model předpokládal. Tyto selhání se zdají být „nefér“, dokud není změřena celková impedance cesty a nebere se jako součást návrhu, nikoli jako poznámka pod čarou.
Nabíječky se liší v podpoře chemie baterií, topologii obvodů, tepelných charakteristikách a cílech návrhu. Mezi běžné priority patří rychlejší nabíjení, nižší povrchová teplota, snížené EMI nebo udržení výkonu systému během nabíjení.
• Lineární nabíječky
• Spínací nabíječky
• Módy power bank/OTG
Výběr často závisí na tepelném rozpočtu, regulačních nebo interoperabilních omezeních a na tom, zda se očekává, že zařízení udrží plný výkon během nabíjení, aniž by se cítilo pomalé nebo se zahřívalo nepříjemně.
Spínače zatížení se běžně používají k řízení napájecích drah pro snížení pohotovostního stavu a k izolaci domén během poruch nebo přepravních stavů. eFusy přidávají programovatelné limity proudu, časovače poruch a kontrolované chování zapnutí.
V mnoha produktech tyto bloky splácí svou deskovou plochu tím, že přetvářejí chaotické režimy selhání, zkraty konektorů, chyby příslušenství a události nesprávného zapojení na zadržené incidenty, místo aby docházelo k kaskádovým resetům nebo fyzickému poškození, které je nákladné na diagnostiku a ještě obtížnější na reprodukci.
Displejové systémy často vyžadují více napájecích drah, jako je AVDD, VGH a VGL, s pečlivě řízeným sekvenováním spuštění, aby se předešlo viditelným artefaktům na displeji. Ovladače LED musí také přesně regulovat proud a spolehlivě reagovat na poruchy otevřeného řetězce a zkratu, protože tyto podmínky se běžně vyskytují během provozu.
Ovladače hradel a vysoce výkonné stupně se stávají stále více relevantními v robotice, automobilovém a průmyslovém vybavení, kde řízení motorů a vysokonapěťová konverze se protínají s koordinací PMIC, telemetrií a politikami ochrany.
Typický „PMIC pro telefon/IoT“
V mnoha telefonech a kompaktních IoT modulech je PMIC nejlépe chápán jako záměrná kombinace bloků spíše než jako jedna kategorie. Integrace je obvykle zaměřena na snížení plochy PCB, zjednodušení sekvencování a poskytnutí firmwaru jednoznačného místa, kde může pozorovat a ovlivňovat chování napájení.
• Více vysoce účinných buck měničů pro CPU, GPU, paměť a neustále aktivní napájecí dráhy
• Jeden nebo více LDO pro nízkošumové analogové a RF napájecí dráhy
• Nabíjecí a napájecí obvody pro koordinaci USB a baterie
• Monitory, sekvencery, tepelná řízení a hlášení přerušení pro telemetrii a zpracování chyb
Co obvykle dominuje výsledkům, je interakce napájecích vlaků. Buck tranzient může spojením s impedancí země zapojit do RF LDO. Termální redukce nabíječe může tiše snížit dostupný systémový proud, a tato změna může způsobit pokles napětí na jádrovém napájecím vlaku během špičky zátěže. Návrhy, které hodnotí každý blok izolovaně, často vypadají čistě v raném bench testování, a poté se stávají problematickými během integrovaného testování zátěže, když vše přepíná, zahřívá se a vyjednává současně.
Výběr a integrace
Přepínací regulátory jsou obvykle vybrány, aby snížily ztráty, přesto mohou zavádět ripple a EMI, které se rozšíří do citlivých oblastí. LDO často zklidňují šum, ale náklady se projevují jako teplo, když je napěťová rezerva štědrá nebo proud není zanedbatelný.
• Přepínací regulátory: vyšší účinnost, více práce s ripple/EMI managementem
• LDO: nižší šum, vyšší tepelné ztráty při snižování napětí
Kompromis, který často funguje dobře, je použít buck k vytvoření mezipásku, a poté použít LDO pro konečný citlivý pás, pokud byla napěťová rezerva a tepelná chování plánována záměrně místo toho, aby byla ponechána po jiných rozhodnutích.
Rychlé změny zatížení vyžadují rychlé regulační smyčky, správný návrh kompenzace a dostatečnou výstupní kapacitu k udržení stabilní regulace během prvních mikrosekund reakce. Výběr kondenzátorů zahrnuje víc než jen zvýšení kapacity. Efektivní kapacita může klesnout kvůli stejnosměrnému napěťovému předpětí, změnám teploty a stárnutí. ESR a ESL také ovlivňují stabilitu obvodů, přechodovou odezvu a výkon EMI, což z nich činí důležité aspekty návrhu.
Týmy, které ověřují s přesným dielektrikem kondenzátoru, napěťovým hodnocením a velikostí pouzdra určeného pro výrobu, se obvykle vyhýbají překvapení ohledně stability v pozdní fázi, zejména když dodavatelské řetězce nutí ekvivalentní substituce, které jsou pouze ekvivalentní na papíře.
Chování PMIC pod poruchou může být navrženo na základě různých filozofií. Jeden přístup usiluje o elegantní degradaci, zpracování brownoutu, indikace throttlingu procesoru, selektivní odpojování napájecích linek, aby systém zůstal použitelný v redukovaném režimu. Jiný přístup vynucuje deterministické vypnutí, aby se rychle dosáhlo známého bezpečného stavu.
• Elegantní degradace: často sladěna s cíli uživatelské zkušenosti v spotřebitelských produktech
• Deterministické vypnutí: často sladěno s předvídatelným chováním v návrzích zaměřených na bezpečnost
PMIC, který nejlépe vyhovuje, je obvykle ten, jehož sekvenování a reakce na poruchy odpovídají zamýšlenému chování produktu, ne ten, který se náhodou propaguje s nejdelším seznamem kontrolních bodů.
Vyšší přepínací frekvence a širokopásmové výkonové stupně zvyšují dosažitelnou hustotu výkonu, ale také vytvářejí přísnější požadavky na rozložení PCB a větší citlivost na EMI. Současně se softwarové funkce, jako je telemetrie, přerušení, funkce logování a programovatelné kontrolní politiky, stávají důležitými faktory v celkovém řízení a integraci napájecího systému.
PMIC, které udržují předvídatelné chování výkonu pod reálnými zátěžemi, mohou výrazně snížit čas potřebný na ladění, zejména v systémech spravujících rádia, procesory, nabíjecí operace a tepelná omezení současně.
Rozsah aplikace PMIC
PMIC se objevují všude tam, kde je třeba elektrickou energii převádět, distribuovat, sekvenovat, sledovat a chránit, zatímco se ztráty a rušení drží pod kontrolou. Jsou běžně používány napříč spotřebitelskými, podnikatelskými, automobilovými a průmyslovými návrhy, avšak hranice obvykle není podle koncového trhu, ale podle toho, jak v praxi vypadá napájecí strom. V okamžiku, kdy produkt obsahuje více napájecích linek s různou tolerancí šumu, různým chováním při skokovém zatížení a různými očekáváními ohledně poruch, PMIC přestává působit jako „výběr součásti“ a začíná působit jako formující síla na chování systému. V mnoha reálných návrzích, jakmile je vysoce výkonný procesor spojen s rádií, senzory, pamětí a vysokorychlostním I/O, architektura napájení končí s omezením toho, co může platforma konzistentně dodávat, i když se výpočty a software na papíře zdají solidní.
Kde chování PMIC omezují výsledky reálného systému
Reakce na zatížení, která tiše nastavuje strop
Moderní CPU a GPU zajišťují náhlé kroky proudu během boost a burst aktivity, a tyto kroky mohou být překvapivě nemilosrdné. Když kontrolní smyčka PMIC, výstupní kapacita a distribuční impedance nemohou udržet napájecí vlak uvnitř těsných mezí, týmy softwaru často reagují způsoby, které jsou subtilní, ale nákladné: zkracují okna pro zvýšení výkonu, zkracují maximální frekvence nebo vkládají širší ochranné pásy, aby nedocházelo k haváriím v terénu. Z engineeringového hlediska může být tato výměna frustrující, protože platforma se může zdát účinná, zatímco stále zanechává výkon na stole pod realistickým provozem.
Týmy, které validují pouze se statickými zatíženími nebo v příjemných laboratorních vzorcích, se to obvykle učí pozdě. Skutečná pracovního zatížení vytváří zubaté hrany: krátké herní výbuchy, špičky AI inferencí a události koexistence rádií mohou produkovat poklesy napětí, které se nikdy neobjevily, když byl kolejnice testována s benigním bench profilem. Nepříjemná lekce je, že opakovatelné transientní chování pod neuspořádanými pracovními zatíženími často přináší více použitelného výkonu než honba za lichotivým číslem účinnosti při jednom pracovním bodě.
Riple a Širokopásmový šum, který se mění na dluh integrity signálu
Ripple by neměl být považován pouze za analogový výkonový parametr. Přepínací harmoniky a širokopásmový šum mohou ovlivnit rozlišení ADC, zvýšit RF fázový šum a snížit signální rezervu SERDES, zejména když sdílejí cesty návratu nebo se spojují skrze indukčnost balení a PCB. Napájecí kolejnice, která se zdá být čistá při testování jednotlivých kolejnic, se může chovat velmi odlišně blízko vysokorychlostních rozhraní, antén nebo hustých sekcí paměti.
Reality rozvržení také mění příběh. Mechanické omezení a oblasti, kde je třeba se vyhnout, nutí k kompromisům, a tyto kompromisy mohou zesilovat vazební cesty, které byly v ideálním rozvržení neviditelné. V praxi si napájecí řešení získá důvěru, když zůstává stabilní a tiché při nedokonalém umístění a neideálním směrování, nejen když je měřeno v nejlepším demonstrovacím uspořádání.
Spuštění a sekvenování, které utváří spolehlivost výsledků
Pořadí spouštění a chování rampy rozhoduje o tom, zda se trénink paměti dokončí konzistentně, zda se rádia kalibrují bez podivných selhání v rozích a zda zóny, které jsou vždy zapnuté, zůstávají stabilní během brownoutů. Marginalní sekvenování často produkuje druh selhání, který odvádí čas a morálku: „jedno z padesáti spuštění“, těžko reprodukovatelné a ještě obtížněji odladitelné, když je systém plně integrovaný.
Sekvenování obvykle funguje lépe, když je řešeno jako součást chování resetu a obnovy spíše než jako pozdní kontrolní seznam. Návrhy, které obstojí v produkci, obvykle považují celou cestu zapnutí/vypnutí napájení za opakovatelný stavový stroj, a poté to prokážou při nejhorších rychlostech rampy, za studených teplot a při nízkých podmínkách baterie. Automatizované cyklení napájení je často místem, kde se získává důvěra, protože odhaluje přechodné hrany, které několik ručních přepnutí napájení nikdy neodhalí.
Výběrová kritéria jako prostor obchodování se systémem
Účinnost hodnocena napříč režimy, ne jako trofejní číslo
Účinnost mění význam v závislosti na tom, jak produkt skutečně tráví svůj čas. Účinnost při špičkovém zatížení může vypadat působivě ve specifikacích, ale skutečná výdrž baterie a tepelný výkon závisí na mnoha provozních podmínkách, včetně procesování výbuchů, normálního zatížení, lehkého zatížení a provozu v hlubokém spánku. Ztráty při přepínání, ztráty při vedení a klidový proud soutěží odlišně v každé oblasti a „vítěz“ se mění s profilem pracovního zatížení.
U návrhů napájených bateriemi se obvykle nízký Iq a silná účinnost při nízkém zatížení přímo ukazují jako delší čas mezi nabíjení, na což týmy produktů obvykle velmi záleží. Pro servery a síťové vybavení obvykle dominují ztráty při vedení a tepelné omezení, protože trvalý proud a odvod tepla se stávají denní realitou. Zakotvený způsob rozhodování je mapovat cíle účinnosti na časovou distribuci pracovních zatížení, místo optimalizace pracovního bodu, který se téměř nikdy nevyskytuje v terénu.
Tepelná rezerva, která brání kolapsu výkonu pod teplem
Tepelné limity často definují maximální udržitelné proudy, což zase definuje maximální udržitelné výpočty. PMIC může vypadat elektricky výborně a stále nesplnit systémové cíle, pokud jeho balení, měď a umístění vytvářejí místní hotspoty blízko paměti, stínících kanálů nebo teplotně citlivých RF bloků. V reálných sestavách mohou malé vzestupy teploty vyvolat chování omezování, ochranné prahy nebo obavy o dlouhodobou spolehlivost, které nikdo nechce vysvětlovat po uvedení na trh.
Návrhy, které dobře stárnou, obvykle plánují tepelnou rezervu. Toto plánování se často projevuje jako tepelné charakteristiky balení, které odpovídají zatížení, vícestupňová schopnost, když profil proudu to ospravedlňuje, a strategií rozvržení, která rozptyluje teplo, zatímco udržuje proudové smyčky dostatečně krátké, aby se zabránilo přeměně tepelných oprav na problémy se šumem.
EMI omezující faktory, které nafukují náklady na harmonogram a iteraci
Frekvence přepínání, rychlosti hran a topologie řízení silně ovlivňují, zda lze EMI zvládnout přímým filtrováním, nebo se stává cyklem otáčení desek a nočních laboratorních sezení. Soulad s technickými listy je pouze částí příběhu; citlivost rozvržení může dominovat výsledkům. Řešení, které vyžaduje téměř dokonalou geometrii smyčky, se může stát sázkou, když mechanické omezení nutí k nepříjemnému umístění.
Mnoho týmů nakonec dává přednost mírně pomalejším, lépe ovladatelným řešením, která mají zvládnutelné přechodové rychlosti a předvídatelné spektrální chování, protože to snižuje čas potřebný na debugování a snižuje riziko certifikace. Tento výběr se může zdát konzervativní, ale často koresponduje s realitou, že problémy s EMI se obvykle objevují pozdě, kdy je časový plán nejméně shovívavý.
Ochranné vlastnosti, které definují zkušenosti se závadami a chování služby
Chování ochrany silně ovlivňuje reakci systému během závadových podmínek. Nastavení OCP, OVP, OTP a ochrany proti zkratu mohou určit, zda systém provede čisté vypnutí, vstoupí do režimu latch-off, nebo se opakovaně restartuje s nestabilním chováním. Tyto reakce přímo ovlivňují obtížnost odstraňování problémů, požadavky na podporu a celkovou percepci spolehlivosti produktu.
Nastavení ochrany také interagují s běžnými provozními událostmi. Agresivní omezení proudu může snížit riziko poškození, ale také může vyvolat opakované resetování během okamžiků s vysokým příkonem nebo špiček při spuštění. Zpracování závad obvykle funguje nejlépe, když je vyladěno jako součást zamýšlené servisní strategie, která určuje, co by mělo být opakováno, co by se mělo uzamknout, co by se mělo zaznamenat a co by mělo rychle selhat, místo aby bylo ponecháno jako výchozí hodnoty registru.
Náklady na integraci, které zahrnují firmware, validaci a realitu debugování
Náklady na integraci zřídka končí na BOM a plošném spoji. Zahrnují práci na firmwaru, rozsah validace, čas testování, výrobní robustnost a zátěž pro debugování, když se něco nechová podle očekávání. Vysoce integrované PMIC mohou zmenšit počet komponentů, což je atraktivní, ale také soustředí riziko: pozdní úprava na jednom napájení může vyžadovat opětovnou kvalifikaci větší části napájecího stromu, než bylo naplánováno.
Více diskrétní přístupy mohou zvýšit úsilí o návrh a správu součástí, přesto mohou nabízet modularitu a jednodušší substituci, pokud se podmínky dodavatelského řetězce změní nebo jsou očekávány úpravy v průběhu životnosti. Upřímnějším výběrovým kritériem je chuť programu na riziko: citlivost na plán, očekávaný počet iterací a jak často pravděpodobně dojde k revizím návrhu po prvním vydání.
Digitální napájecí funkce: flexibilita, která má svá úskalí
Telemetrie, programovatelné napájecí větve a dynamické řízení napětí mohou přinést skutečné výhody: těsnější optimalizaci napájení, jasnější diagnostiku závad a adaptivní škálování výkonu, které sleduje pracovní zatížení a teplotu. Zároveň tyto funkce přinášejí závislosti na firmwaru, kontrolu konfigurace, výrobní programovací disciplínu a zcela nové režimy selhání, které neexistují v jednodušších analogových konfiguracích. Telemetrie se stává hodnotnou pouze tehdy, když jsou shromážděná data aktivně využívána pro monitorování a rozhodování o návrhu místo toho, aby zůstávala nevyužitá v diagnostických přehledech.
Z praktického hlediska si digitální napájení vydělává na své udržitelnosti, když uzavírá měřitelnou smyčku. Pokud lze použít programovatelnost k obnově výtěžnosti, prodloužení životnosti baterie nebo prevenci tepelných omezování s kontrolovanými politikami, stává se silnou pákou. Pokud je povolena jednoduše proto, že je k dispozici, často se z ní stává nevyužitý povrch konfigurace, který komplikuje validaci, zvyšuje riziko nesprávné konfigurace výroby a vytváří nejasnosti ohledně toho, jaká nastavení jsou skutečně zamýšlena.
Praktický výběrový a validační tok, který sleduje chování systému
Pracovní postup, který se obvykle osvědčuje pod tlakem, začíná od cílů chování systému namísto procházení katalogem PMIC a doufáním, že se shoda vydaří později. Rozdělí problém na konkrétní, testovatelné části a nutí jasnost ohledně toho, co dobré chování znamená před spuštěním desky.
• Převeďte přechody pracovního zatížení na požadavky na napájení (přijatelná pokles, doba ustálení, špičkový proud, frekvence opakování).
• Definujte rozpočty šumu pro citlivé bloky (ADC, PLL, SERDES, RF) a mapujte je na limity rozvirování a předpoklady návrhu.
• Specifikujte sekvencování, závislosti resetu a zotavení po poklesu napětí jako jeden stavový automat.
• Odhadněte riziko EMI brzy s realistickými umístěnými omezeními a zamýšleným přístupem k stínění.
• Validujte chování ochrany s vložením závad, které připomíná skutečné zkraty, události kabeláže a pokles napětí baterie.
ADC / PLL / SERDES / RF
Tento styl přístupu snižuje překvapení v pozdních fázích, protože zachází s PMIC jako s mechanismem, který řídí chování napájení na úrovni systému, ne jako s pozadím služeb. Když je napájení navrženo jako plnohodnotný subsystém, stává se výkon konzistentnějším, spolehlivost je snáze obhajitelná daty a práce na shodě je obvykle předvídatelnější, zatímco tým tráví méně času pronásledováním přerušovaných selhání, která vznikají na napájení spíše než v logice nebo softwaru.
Budoucí směry pro PMIC
Vyšší výkonová hustota a nižší napětí jádra způsobují, že PMICy regulují s těsnějšími elektrickými tolerancemi a menší tolerancí pro zpoždění. Jak se napájecí větve přibližují k minimálnímu pracovnímu bodu digitální zátěže, i mírný pokles se může projevit jako měkké chyby, restartování nebo ztlumení výkonu, které se během uvedení systému zdá „tajemné“. To postupně odklání pozornost návrhu od toho, jak přesně vypadá napětí při ustáleném stavu, směrem k tomu, jak se chová během nejhorších scénářů rychle se měnících zátěžových událostí.
Týmy často narážejí na nepříjemnou realitu: smyčka, která na benchu vypadá klidně, se může v produktu chovat špatně, jakmile skutečné pracovní zátěže vytvoří ostré skoky zatížení, lokalizované horké body a nerovnoměrné sdílení fázového proudu. Odolnější vzor je považovat návrh smyčky, volbu výkonových stupňů a impedanci PDN za jednotný spojený systém, a poté ověřit chování pomocí reprezentativních pracovních signatur spíše než čistými, idealizovanými pulsy.
Rychlejší přechody přirozeně směřují návrhy k těsnějším smyčkám, přesto však těsnější smyčky dělají návrhy více vystavené parazitní indukčnosti, nahromadění tolerancí a šumu snímání, které je snadné podcenit v počátečních fázích. V mnoha programech rozdíl mezi stabilním a terénně stabilním přichází z vylepšeného modelování malých signálů, důvěryhodného snímání proudu a kompenzace, která je laděna s ohledem na skutečné uspořádání.
Zvyšování spínací frekvence může pomoci, ale automaticky se to nepromítá do lepšího chování při přechodech, pokud snímací cesta a geometrie PCB nemohou podpořit přidanou šířku pásma. Když k tomu dojde, zisk smyčky se vynakládá na zesilování šumu, což se může projevit jako jitterové spínání, slyšitelné artefakty v určitých provozních režimech nebo vrcholy EMI, které se objeví až po mechanické integraci.
Moderní bloky počítačů a konektivity generují poptávku, která je přerušovaná a složená, takže validace přechodů stále více odráží to, co software a rádia skutečně dělají, spíše než to, co může zátěžová jednotka přibližně napodobit s jedním krokem.
Mnoho týmů se shoduje na pracovním postupu, který kombinuje:
• Zatěžování laboratoří
• Telemetrické záznamy platformy
• Iterativní aktualizace kompenzace a výběru odrušovacích prvků.
Tento přístup obvykle snižuje pozdní překvapení, zejména když se tepelná omezení pomalu přetvářejí na elektrické chování a během času mění tolerance.
Tlak na zmenšení velikosti při zlepšení výkonu prodlužuje integraci do balení a do okolní struktury, nejen do křemíkového die. Pokročilé balení a integrované pasivní komponenty mohou zkrátit smyčky s vysokým di/dt, snížit parazitní prvky a zpevnit reakci na přechody způsoby, které se během ladění zdají okamžitě měřitelné. Integrované magnetiky mohou dále zvýšit výkonovou hustotu, ale výhoda je často omezena tepelnými cestami, mechanickými omezeními a tím, jak se mění vazba, jakmile je návrh uvnitř svého skutečného obalu.
V nasazených produktech pocházejí nejtrvalejší zisky z integrace často z redukce citlivosti na variabilitu výroby a stabilizace výkonu napříč výrobním rozptylem, spíše než pouze zkrácení nákladů na materiál.
Výběr balení stále více odráží elektrické a tepelně výsledky, včetně nižší indukčnosti smyčky, zlepšeného šíření tepla a předvídatelnějšího řízení impedance. Běžnou zkušeností na poli je, že dvě desky sdílející stejnou schématickou strukturu mohou mít výrazně odlišné chování, když jeden návrh zachovává kompaktní proudovou smyčku a druhý rozptyluje energetickou cestu přes PCB.
Jak se zvyšuje integrace systému, plánování rozložení je často upřednostňováno dříve ve vývoji, protože pozdější změny komponent nemohou vždy opravit problémy způsobené špatnou geometrií nebo routováním PCB.
Integrované magnetiky mohou zvyšovat účinnost při vyšší frekvenci a snižovat výšku, což je atraktivní u kompaktně zabalených produktů. Současně však mohou zavádět nové vazební cesty a vytvářet tepelné horké body, které jsou obtížně detekovatelné až u pozdních prototypů. Návrhy, které probíhají hladce, obvykle považují induktor a balení za kombinované téma EMI a tepla, včetně rozhodnutí o umístění blízko antén, vysokorychlostních spojení a citlivých senzorů.
Praxe EMI se odklání od ryze statických mitigací a směrem k kontrolním strategiím, které anticipují provozní podmínky. Techniky jako modulační spektrum, chytřejší řízení měničů a bohatší on-chip snímání mohou snižovat vrcholy, ale také vyžadují koordinaci, aby se předešlo prostému výměně vrcholových emisí za širokopásmový šum nebo rádiové rušení.
Mnoho týmů zažilo sekvenci: počáteční kontroly EMI projdou, pak pozdější verze selžou, když se více regulátorů spíná v korelovaných vzorcích, když nová firmware změna mění načasování pracovní zátěže, nebo když se kabely a štíty mění v návratových cestách. Tyto zkušenosti posouvají myšlení o EMI výše na úroveň platformy, místo aby bylo každé regulátor považováno za izolovanou jednotku.
Jak se zrychlují přepínací hrany, kontrola dv/dt stále více ovlivňuje jak emise, tak dlouhodobé zatížení. Řidiče hradel přidávají více programovatelnosti a ochranná logika se stává více kontextově vědomou, což může ladění připadat více jako inženýrství systému než výběr komponentů.
Praktický návyk, který šetří čas, je ladit rychlosti přepínání pomocí měření provedených ve finální mechanické konfiguraci, protože stínění, svazky a zemní struktury často mění výsledek EMI způsoby, které odhalená deska neukáže.
Zlepšené snímání na čipu umožňuje adaptivní chování, jako je posun přepínacího chování, když emise přiblíží k limitu nebo když se změní provozní režim. Postupem času to odvádí PMIC od chování s pevnou funkcí a směrem k řízeným subsystémům, které neustále vyjednávají výkon, šum a tepelný stav na základě zpětné vazby spíše než předpokladů.
Systémy napájené bateriemi nadále usilují o ultra nízký klidový proud a silnou účinnost při nízkém zatížení pomocí technik jako je PFM/burst provoz, emulace diod a automatický výběr režimu. Emoční napětí, které mnoho týmů uznává, je to, že stejné režimy nízkého zatížení, které na datovém listě vypadají skvěle, mohou zavést šum, slyšitelné artefakty nebo přerušované EMI signatury, které si ihned všimnete, i když průměrná účinnost vypadá vynikající.
Aby se snížil nejasnost, týmy stále častěji definují, co znamená přijatelně očekávané chování v konkrétních termínech, a poté vybírají strategii režimu, aby odpovídala.
Běžně specifikované cíle zahrnují:
• Limity vlnení ve spánku/ pohotovosti
• Latence probuzení
• Akustické/ šumové omezení
• Chování EMI během periodických údržbových aktivit.
V praxi životnost baterie při realistických pracovních cyklech často spolehlivěji vypráví příběh než čísla špičkové účinnosti, zejména když pracovní cyklus zahrnuje spánek, periodické probuzení, rádiové impulzy a vzorkování senzorů.
Automatické přepínání režimu je atraktivní, ale přechody mohou vytvářet krátké rušivé signály, které zmizí v průměrovaných měřeních a ukazují se pouze jako vzácné resetování nebo přerušované stížnosti na šum. Návrhy, které se v terénu cítí "pevné", často věnují dodatečné úsilí při validaci právě na hranicích mezi PFM a PWM, včetně sekvencování probuzení, zpoždění sekvence a zátěžových kroků na hranici podmínek.
Opakující se vzor je, že nejagresivnější nastavení účinnosti není vždy nejpohodlnější volbou produktu, když produkuje vlnení, které se mění s podmínkami, nebo šumovými vazbami, které je obtížné reprodukovat. Mnoho týmů nakonec zvolí konfiguraci, která obětuje malé množství účinnosti výměnou za chování, které je opakovatelné napříč teplotou, variacemi výroby a scénáři, což často snižuje riziko integrace a snižuje obrat podpory.
Jak se výpočetní platformy zvětšují, stále více se spoléhají na přesnou telemetrii, adaptivní škálování napětí a ochranu, která je koordinována napříč mnoha zátěžemi. Telemetrie hraje praktickou roli v každodenním inženýrství: může zkrátit zavádění, urychlit analýzu příčin a snížit pokušení nadměrného navrhování "jen pro případ" tím, že odhalí, kde se ve skutečnosti nachází rezerva.
Telemetrie má tendenci být nejdůležitější, když se podmínky rychle mění, nikoli když je zátěž stabilní a snadno měřitelná. Budoucí PMIC pravděpodobně zlepší chování vzorkování, výběr filtrů a časovou synchronizaci, aby softwarová rozhodnutí přesněji sledovala realitu.
Jedna nuance, kterou zkušené týmy obvykle ocení, je, že více vzorků automaticky není užitečnější; konzistence, stabilita kalibrace při různých teplotách a jasné definice šířky pásma a latence často rozhodují, zda lze na data jednat důvěryhodně.
S více zátěžemi přichází silnější potřeba koordinovaného chování ochrany, aby systém reagoval koherentně spíše než zátěž za zatížením.
Koordinace ochrany často zahrnuje:
• Chování reakce OCP
• Chování reakce OVP
• Chování reakce UVP
• Chování reakce OTP
• Závislosti sekvencí
• Politiky obnovy po chybě
• Sdílení stavu mezi PMICs
Skutečné systémy často selhávají ne proto, že by chyběla funkce, ale proto, že zatížení reagují na stejnou událost různě, což vytváří kaskády brownoutu nebo smyčky restartu, které jsou frustrující pro diagnostiku. Koordinovaný přístup k řešení problémů, sdílený stav a jednotný plán obnovy lépe odpovídá tomu, jak se očekává, že platformy se budou chovat pod tlakem.
Přijetí GaN a SiC poroste v oblastech, kde frekvence spínání a účinnost materiálně změní velikost nebo výkonnostní limity. Rychlejší spínání může zmenšit magnetické součásti a zrychlit přechodnou odezvu, přesto však zvyšuje stres spojený s dv/dt, citlivost na EMI a požadavky na návrh ovládání hradel a izolační strategii. Omezení nejsou čistě elektrická; zahrnují také provozní limity v rámci výrobních variací a scénářů neférového použití, které týmy se naučily brát vážně.
Řešení GaN a SiC mají tendenci odměňovat přesnou kontrolu ovládání hradel, disciplinovaný návrh a ochranné schémata, která zabraňují přestřelům, vyzvánění a neúmyslnému zapnutí. Praktický poznatek, který se opakuje, je, že kvalita uspořádání může dominovat výběru zařízení; dobře provedené uspořádání s „skromným“ zařízením může překonat prémiové zařízení umístěné do hlučné induktivní smyčky.
Jak se zvyšují rychlosti spínání, volby izolace a dlouhodobé limity spolehlivosti se stávají v návrhových přezkumích a plánech kvalifikace významnějšími. Přijetí obvykle zrychluje tam, kde výkonnostní zisky jasně ospravedlňují dodatečnou náročnost na design, zatímco nákladově citlivé nebo citlivé na šum produkty často postupují opatrněji a vyžadují jasnější důkazy o prospěchu na úrovni systému.
PMIC jsou stále více tvarovány tak, aby se chovaly jako vykonavatelé politiky, kteří v reálném čase rozhodují o účinnosti, šumu, teplotách a spolehlivosti. Architektury, které mají tendenci stárnout dobře, zacházejí s energií jako s řízeným zdrojem: telemetrie PMIC informuje softwarovou politiku a softwarová politika na oplátku upravuje provozní režimy PMIC a chování napájecího vedení. To stírá hranici mezi vlastnictvím hardwaru a firmwaru způsobem, který se zpočátku může zdát nepohodlný, ale často se to vyplácí snižováním naskakování marže a zlepšováním odolnosti pod reálným pracovním zatížením.
Závěr
Efektivní obraná obvodová ochrana závisí na více než jen na přidání jediné ochranné součásti. Spolehlivé návrhy vyžadují správnou koordinaci mezi odklonem přepětí, omezováním napětí, omezením proudu, uzemněním, uspořádáním a načasováním závady. Každé ochranné zařízení má své vlastní silné a slabé stránky, takže výběr musí odpovídat očekávanému typu závady, úrovni energie, rychlosti odezvy a provoznímu prostředí. Dobře naplánovaná ochranná strategie zlepšuje bezpečnost, snižuje riziko selhání a podporuje dlouhodobou spolehlivost v reálných elektronických systémech.
Často kladené dotazy (FAQ)
1. Proč je PMIC považován za koordinátora systémové úrovně, spíše než jen za regulátor napětí?
PMIC dělá mnohem víc než pouze převádět jedno napětí na jiné. Řídí, jak jsou generovány, sekvenovány, monitorovány, distribuovány a chráněny různé napájecí větve v celém systému. V praktických návrzích PMIC koordinuje napájecí větve procesorů, napájecí zdroje pamětí, RF sekce, senzory a periferní domény a zároveň zvládá načasování spuštění, obnovu závad, tepelné události a signály napájení. Vzhledem k tomu, že veškeré tyto chování spolu interagují během zavádění a provozu, PMIC se často stává jedním z hlavních faktorů formujících spolehlivost a stabilitu systému.
2. Proč se selhání související s PMIC často objevují pouze pod reálným zatížením, nikoli během jednoduchého laboratorního testování?
Testování na lavici s statickými zátěžemi zřídka reprodukuje rychlé přechodné chování generované moderními procesory, RF vysílači, paměťovým provozem a impulzy senzorů. Za realistických provozních podmínek zažívají napájecí větve náhlé proudové špičky, které odhalují slabiny v přechodné odezvě, parazitních efektech PCB, ladění kompenzace a stabilitě výstupní sítě. PMIC může vypadat stabilně během řízeného testování, ale později může vykazovat pokles, přestřelku, zvonění nebo sekvenční závady, jakmile skutečná pracovní zatížení vytvářejí rychle se měnící elektrické požadavky.
3. Proč je sekvenování napájení považováno za smlouvu na úrovni systému, spíše než za jednoduchou funkci spuštění?
Mnoho digitálních systémů vyžaduje specifické časové vztahy mezi základními větvemi, napájecími větvemi paměti, napájecími zdroji I/O, signály resetování a oblastmi, které jsou vždy zapnuty. Pokud se napájecí větve zvyšují v nesprávném pořadí nebo s nesprávným načasováním, procesory, bloky uchovávání SRAM a vysoce výkonná rozhraní mohou vstoupit do nedefinovaných provozních stavů. Tyto problémy často vytvářejí přerušované selhání zavádění, která se objevují pouze během extrémních teplot, brownoutů nebo podmínek horkého připojení baterie. Správné sekvenování se proto stává koordinovanou dohodou mezi požadavky hardwaru, firmwaru a křemíku spíše než funkčním komfortem.
4. Proč může přechodná odezva PMIC tiše omezit výkon CPU a GPU v reálném světě?
Moderní procesory generují náhlé skoky proudu během boost operací, AI pracovních zátěžích, herních výbuchů a rádiové aktivity. Pokud PMIC nedokáže udržet stabilní napětí během těchto událostí, může firmware snížit dobu boostu, snížit taktovací frekvenci nebo rozšířit časové okna, aby se zabránilo pádům. U mnoha produktů tišší omezení dodávky energie potichu omezují udržovanou výkonnost, i když procesor sám o sobě vypadá schopný na papíře. Stabilní přechodná odezva často má větší vliv na použitelnost systémového výkonu než samotné specifikace vrcholové účinnosti.
5. Proč vytváří ripple a spínací šum z PMIC problémy daleko za rámec samotného subsystému napájení?
Spínací harmonické a širokopásmový šum se mohou spojit do RF obvodů, referencí ADC, PLL, SERDES spojení a citlivých analogových cest prostřednictvím sdílené impedance země a parazitů PCB. I relativně malé hladiny ripple mohou snížit přesnost ADC, zvýšit fázový šum, zúžit časové okno nebo zhoršit spolehlivost vysokorychlostní komunikace. Kolejnice, která vypadá elektricky přijatelná v izolaci, může vytvářet vážné problémy integrity signálu, jakmile je integrovaná do hustých smíšených signálových systémů.
6. Proč často tepelné omezení PMIC definují maximální udržovanou výpočetní výkonnost?
Jak teplota PMIC stoupá, účinnost klesá a mechanismy tepeln保护 mohou začít omezovat dostupný proud nebo spouštět chování foldback. V kompaktních systémech mohou lokalizované horké body poblíž procesorů, paměti nebo RF sekcí donutit PMIC do tepelně sníženého režimu dlouho před tím, než budou dosaženy teoretické elektrické limity. Z tohoto důvodu udržovatelný výkon systému často závisí stejně na tepelném uspořádání, šíření mědi a výběru balení jako na specifikacích regulátoru samotného.
7. Proč inženýři často kombinují buck měniče s LDO regulátory v citlivých návrzích?
Buck měniče poskytují efektivní snížení napětí pro vysokoprůtokové kolejnice, ale zavádějí spínací ripple a EMI. LDO vytvářejí mnohem čistší výstupní napětí s nižším šumem, ale při snižování větších napětí uvolňují více tepla. Běžným kompromisem je použití buck měniče k efektivnímu generování meziřetězcové kategorie, následované LDO pro vyčištění konečného citlivého analogového nebo RF napájení. Tato kombinace vyvažuje efektivitu, tepelnou správu a snižování šumu účinněji než spoléhat se na jakoukoli topologii samostatně.
8. Proč jsou politiky reakce na závady PMIC považovány za součást celkového produktového zážitku?
Chování při závadě určuje, zda se produkt čistě vypne, vstoupí do smyčky restartu, snižuje výkon nebo se stává nestabilním během abnormálních podmínek. Ochrana proti přetížení, tepelný vypínač, zacházení s podnapětím a časování obnovy přímo ovlivňují, jak zažíváme poruchy baterie, problémy s kabelem nebo události přetížení. Dobře navržené politiky PMIC předvídatelně izolují závady a obnovují se kontrolovanými způsoby, čímž snižují složitost servisu a zabraňují drobným problémům, aby se přerostly do celkových selhání systému.
9. Proč moderní PMIC stále více spoléhají na telemetrii a programovatelné napájecí politiky?
Moderní systémy dynamicky mění pracovní zátěž, tepelný stav, rádiovou aktivitu a chování nabíjení v reálném čase. Telemetrie PMIC umožňuje firmwaru neustále monitorovat podmínky kolejnic, spotřebu proudu, teplotu a události závad. Tato data umožňují adaptivní regulaci napětí, tepelnou správu, inteligentní snižování výkonu a koordinovaná ochranná rozhodnutí. Programovatelné napájecí systémy však také zavádějí novou složitost ověření, protože nesprávná konfigurace firmwaru může vytvořit selhání, která neexistují v pevných analogových návrzích.
10. Proč se budoucí návrhy PMIC posouvají směrem k „orchestrace energie“ místo jednoduché konverze energie?
Budoucí PMIC jsou stále více očekávány, že budou koordinovat účinnost, teplo, chování EMI, ochranu, škálování pracovního zatížení, politiky nabíjení a systémovou telemetrii současně. Rychlejší spínací technologie, užší napěťové odchylky a vysoce dynamické pracovní zátěže vyžadují, aby PMIC neustále přizpůsoboval své chování na základě skutečných provozních podmínek namísto statických předpokladů. Tato evoluce proměňuje PMIC v aktivní subsystém správy, který úzce spolupracuje s firmwarem a systémovým softwarem na udržení stabilního, efektivního a předvídatelného provozu platformy za měnících se podmínek.
Související blog
-
Kolik nul v milionu, miliardách, bilionu?
![Kolik nul v milionu, miliardách, bilionu?]()
2024/07/29
Milion představuje 106, snadno pochopitelná postava ve srovnání s každodenními předměty nebo ročními platy. Miliarda, což odpovídá 109, z... -
Datový list IRLZ44N MOSFET, obvod, ekvivalent, pineout
![Datový list IRLZ44N MOSFET, obvod, ekvivalent, pineout]()
2024/08/28
IRLZ44N je široce používaný N-kanálový mosfet.Je známý svými vynikajícími schopnostmi přepínání, je vysoce vhodný pro mnoho aplikací,... -
Teplota baterie je příliš nízká, nabíjení se zastavilo.Jak to opravit?
![Teplota baterie je příliš nízká, nabíjení se zastavilo.Jak to opravit?]()
2024/10/6
Problémy s nabíjení baterií mobilního telefonu jsou běžné, ale lze je efektivně spravovat.Teplota hraje velkou roli v účinnosti baterie, pr... -
BC547 Transistor Comprehensive Guide
![BC547 Transistor Comprehensive Guide]()
2024/07/4
Tranzistor BC547 se běžně používá v různých elektronických aplikacích, od základních signálních zesilovačů po komplexní obvody oscil... -
Komplexní průvodce pro SCR (usměrňovač ovládaného křemíkem)
![Komplexní průvodce pro SCR (usměrňovač ovládaného křemíkem)]()
2024/04/22
Křesťánové usměrňovače (SCR) nebo tyristory hrají klíčovou roli v technologii Power Electronics kvůli jejich výkonu a spolehlivosti.Tento ... -
LR621, SR621SW, 364, Ekvivalenty a náhrady baterie AG1
![LR621, SR621SW, 364, Ekvivalenty a náhrady baterie AG1]()
2024/07/15
Klapivé baterie LR621 a SR621SW převládají v kompaktních elektronických zařízeních, jako jsou hodinky, malé hračky, kalkulačky a odlehlé ... -
Základy obvodů op-amp.
![Základy obvodů op-amp.]()
2023/12/28
Ve složitém světě elektroniky nás cesta do jejích tajemství vždy vede k kaleidoskopu komponent obvodů, jak vynikající, tak komplexní.V srd... -
Kompletní průvodce multiplexery a jejich roli v digitálních systémech
![Kompletní průvodce multiplexery a jejich roli v digitálních systémech]()
2025/09/20
Multiplexery jsou komponenty v digitálních systémech, které jsou navrženy tak, aby nasměrovaly více vstupních signálů do jediného výstupn... -
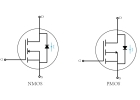
Porovnání rozdílů a aplikací NMOS a PMOS
![Porovnání rozdílů a aplikací NMOS a PMOS]()
2024/11/15
Pochopení rozdílů mezi tranzistory NMO a PMOS je důležité při navrhování účinných obvodů.NMOS (N-typ-typ-oxid-Semiconductor) a PMOS (p-ty... -
CR2450 vs CR2032 Porovnání: Vše, co potřebujete vědět
![CR2450 vs CR2032 Porovnání: Vše, co potřebujete vědět]()
2025/09/15
Blatonobílé baterie jako CR2450 a CR2032 Power Mnoho každodenní elektroniky, od hodinek a dálkových ovladačů po lékařská a průmyslová za...




Hot Parts
- MT46V16M16TG-5B:F
- SC28L92A1A
- AGL1000V2-FGG256
- SN74LV06APWR
- GSOT36C-HE3-08
- C3216X5R1H685M160AB
- LTC1412CG#PBF
- ADP3408ARU-2.5-RL7
- KMPC859TZP133A
- AD8567ARU-REEL
- RT1P141C-T112-1
- MC100LVEP111MNG
- 22255C105KAT4A
- LT3502EDC#TRMPBF
- C2012C0G2W152J085AA
- 06035A680GAT2A
- S912XDT384J1VALR
- ADM561JRZ-REEL
- MAX794CSE-T
- AAT3242ITP-WN-T1
- CL31B104KBPWPNE
- PI49FCT3805BQX
- 08051A121JAT4A
- CY7C342-25JC
- GRM1556P1H5R3CZ01D
- DSA300I200NA
- ATSAM3U2CA-CU
- SSTUF32864BHLFT
- 20ETS08S
- UC2901DTR
- RT1206DRD07590RL
- 4N49UTX
- PIC16LF1829T-I/SS
- BQ4845S-A4NTR
- AD7896BRZ
- S29AL016D90TFI013
- F721C686MRC
- BCM57780A1KML1G
- SLRC61003HNE
- VI-JN3-CZ
- 25FR120
- CS18LV10245CIR70
- ETS7627A
- IX2992CE
- LXT16653
- AR0147ATSC00XUEA0-DPBR
- M3602-B1AG
- M45PE80VMP6
- NT71263FG-307
- SN74LVC1G06DCK