- Čeština
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
Strojové vidění a vizuální senzory: Pracovní principy a aplikace
Katalog
Co je strojové vidění?
Strojové vidění je technologie, která umožňuje strojům zachytit, zpracovat a analyzovat obrazy skutečných objektů. Spojuje kamery, senzory, optické čočky, osvětlení a software pro zpracování obrazů, aby shromáždila vizuální informace a přetavila je na užitečná data pro automatizovaná rozhodnutí.
V praktických aplikacích strojové vidění vykonává řadu úkolů vizuální inspekce a měření, které by jinak vyžadovaly lidskou pozorování. Místo toho, aby se spoléhalo na osobu, která se podívá na produkt a posoudí jeho stav, systém zaznamenává jasný obraz objektu, převádí tento obraz na digitální informace a zkoumá specifické vizuální detaily. Tyto detaily mohou zahrnovat tvar, velikost, polohu, barvu, jas, okraje, vzory a podmínky povrchu. Analyzováním těchto charakteristik může systém určit, zda objekt splňuje předem definované požadavky.
Jak funguje systém strojového vidění
Proces strojového vidění následuje logickou sekvenci kroků. Nejprve objekt vstoupí do inspekční oblasti a je osvětlen pomocí řízeného světelného zdroje. Správné osvětlení pomáhá odhalit důležité vizuální vlastnosti a snižuje stíny, odrazy nebo další podmínky, které by mohly ovlivnit kvalitu obrazu.
Poté kamera zachytí obraz objektu z konkrétního úhlu a vzdálenosti. Zachycený obraz je poté převeden na digitální pixelová data, kde každý pixel obsahuje informace o jasu, barvě nebo intenzitě. Tento digitální obraz je přenesen do systému pro zpracování obrazů k analýze.
Software podrobně zkoumá obraz tím, že identifikuje okraje, porovnává tvary, měří rozměry, detekuje barevné variace a hodnotí povrchové vlastnosti. Zpracovává vzory pixelů a hodnoty intenzity, aby izolovalo nejdůležitější informace. Extrahovaná data jsou poté porovnávána s předem definovanými standardy, tolerancemi nebo inspekčními pravidly, aby se určilo, zda objekt splňuje požadovaná kritéria.
Aplikace a výhody strojového vidění
Po dokončení analýzy systém generuje výsledky, které lze použít k podpoře širokého spektra průmyslových operací. Strojové vidění může provádět přesná měření, identifikovat vady povrchu, ověřovat kvalitu výrobků, třídit položky na základě specifických vlastností, určovat přesnou polohu objektů a poskytovat vedení pro robotické systémy během manipulace nebo montáže.
Protože strojové vidění dokáže rychle a konzistentně kontrolovat velké množství objektů, pomáhá zlepšovat přesnost, efektivitu a spolehlivost výroby. Jeho schopnost provádět podrobné inspekce v reálném čase z něj učinila klíčovou technologii ve výrobě, průmyslové automatizaci, robotice, balení, výrobě elektroniky a systémech kontroly kvality.
Složení systémů strojového vidění
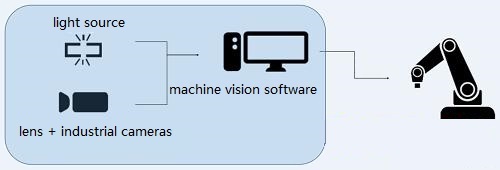
Systém strojového vidění se skládá z několika hardwarových a softwarových komponentů, které společně pracují na automatické kontrole, měření, identifikaci a sledování objektů. Každá součást vykonává specifický úkol v inspekčním procesu. Od okamžiku, kdy objekt vstoupí do inspekční oblasti, až po chvíli, kdy je učiněno rozhodnutí, informace procházejí sérií propojených kroků. Tyto kroky zahrnují detekci objektu, akvizici obrazu, přenos obrazu, zpracování obrazu, generování výsledků a kontrolu zařízení.
Pro přesnou a spolehlivou inspekci musí každá součást pracovat v koordinaci. Zpoždění při zachycování obrazu, špatné osvětlení nebo nepřesné umístění mohou ovlivnit kvalitu konečného výsledku. Proto výkon celého systému závisí na tom, jak dobře tyto komponenty spolupracují.
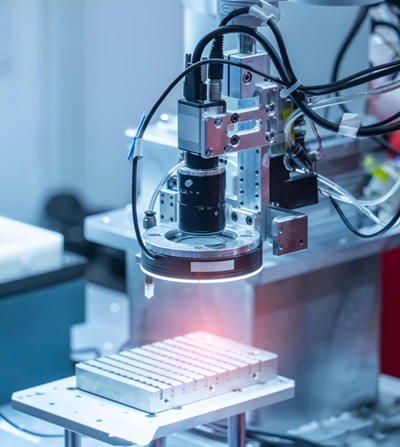
Kamera a objektiv
Kamera a objektiv tvoří sekci akvizice obrazu systému strojového vidění. Jejich úkolem je zachytit jasný a detailní obraz objektu, který se kontroluje.
Proces začíná, když světlo odražené od povrchu objektu vstoupí do objektivu. Objektiv toto světlo sbírá a zaostřuje na senzor kamery. Kvalita tohoto zaostření přímo ovlivňuje ostrost obrazu. Pokud je obraz rozmazaný, mohou být malé vady, hrany, značky nebo rozměrové detaily těžko detekovatelné.
Po dosažení senzoru kamerou se optický obraz převádí na digitální obrazová data. Tato data se skládají z tisíců nebo dokonce milionů pixelů, které představují vizuální vlastnosti objektu. Obraz je poté připraven k zpracování systémem vidění.
Různé inspekční úkoly vyžadují různé konfigurace kamer. Nastavení s jednou kamerou může být dostatečné, když je potřeba pouze jeden pohled na objekt. Produkty se složitými tvary však často vyžadují více kamer umístěných pod různými úhly. To umožňuje systému kontrolovat několik povrchů současně, odstranit slepé body a zachytit úplnější informace.
Kamery pro strojové vidění jsou k dispozici v několika typech, včetně monochromatických kamer, barevných kamer, lineárních skenovacích kamer, plošných skenovacích kamer, progresivních skenovacích kamer a kamer s vysokým rozlišením. Výběr závisí na faktorech, jako je velikost objektu, rychlost výroby, požadovaná detailnost obrazu, zorné pole a přesnost měření.
Světelný zdroj
Světelný zdroj je jednou z nejkritičtějších součástí systému strojového vidění, protože kvalita obrazu silně závisí na správném osvětlení.
Před zachycením obrazu musí být objekt osvětlen kontrolovaným a konzistentním způsobem. Cílem není pouze učinit objekt viditelným. Osvětlení musí jasně odhalit vlastnosti, které je třeba zkontrolovat. Tyto vlastnosti mohou zahrnovat hrany, škrábance, praskliny, povrchové textury, tištěné znaky, etikety, barevné rozdíly nebo rozměrové hranice.
Správné osvětlení zvyšuje kontrast obrazu a činí důležité detaily viditelnějšími na pozadí. Například malý škrábanec na kovovém povrchu může být obtížně viditelný za normálních světelných podmínek, ale může se stát velmi viditelným, když je osvětlen z určitého úhlu.
Mezi běžné technologie osvětlení patří LED osvětlení, fluorescentní osvětlení, optické osvětlení a halogenové osvětlení. Mezi těmito možnostmi je LED osvětlení široce používáno, protože poskytuje stabilní jas, dlouhou životnost a nízké nároky na údržbu.
Metoda osvětlení je vybírána na základě několika faktorů, včetně materiálu objektu, barvy, povrchové textury, odrazivosti, tvaru a inspekčního úhlu. Dobře navržené osvětlení pomáhá snižovat stíny, oslnění a odrazy, což vede k vyšší přesnosti detekce a konzistentnějším výsledkům měření.
Senzory
Senzory jsou odpovědné za detekci přítomnosti, polohy nebo pohybu objektu před zahájením akvizice obrazu.
Na typické výrobní lince se produkty kontinuálně pohybují po dopravníku nebo automatizovaném manipulačním systému. Kamera musí zachytit obraz v správný okamžik. Pokud je obraz pořízen příliš brzy nebo příliš pozdě, důležité oblasti inspekce mohou být přehlédnuty.
Aby se předešlo tomuto problému, senzor sleduje pohyb objektu a určuje, kdy dosáhne inspekční pozice. Jakmile objekt dorazí na určené místo, senzor pošle signál spouštění kameře.
Mezi běžné typy senzorů patří optické vlákno, blízkostní senzory, fotoelektrické senzory a fotoelektrické spínače. Tato zařízení poskytují přesné časové informace a pomáhají synchronizovat pořizování snímků s pohybem objektu.
Přesné spouštění snižuje chyby spojené s pohybem, zlepšuje konzistenci snímků a zajišťuje, že každý objekt je inspekován za stejných podmínek.
Karta pro snímání obrazu
Po tom, co kamera získá snímek, musí být obrazová data převedena do zpracovatelského systému. Tento úkol provádí karta pro snímání obrazu.
Karta pro snímání přijímá obrazové signály z kamery a převádí je do formátu, který počítač a software pro zpracování obrazu mohou efektivně zpracovat. Během vysoce rychlých inspekcí musí být velké množství obrazových dat přenášeno rychle a spolehlivě. Karta pro snímání pomáhá udržovat stabilní přenos dat a zabraňuje ztrátě obrazu.
Kromě přenosu obrazových dat může karta pro snímání řídit několik funkcí kamery. Tyto funkce mohou zahrnovat spouštění kamery, kontrolu expozice, úpravu integračního času, synchronizaci a řízení závěrky.
Různé karty pro snímání podporují různé komunikační standardy a hardwarové rozhraní. Běžná průmyslová rozhraní zahrnují PCI, Compact PCI, PC104 a další průmyslové komunikační platformy. Vybrané rozhraní musí odpovídat jak kameře, tak zpracovatelskému systému, aby byla zajištěna plynulá funkčnost.
PC Platforma
Počítač slouží jako centrální zpracovatelská jednotka systému strojového vidění. Přijímá obrazová data, provádí inspekční algoritmy, ukládá informace a komunikuje výsledky s dalším zařízením.
Jakmile snímek dorazí z kamery, počítač zpracovává data krok za krokem. Může měřit rozměry, určovat konkrétní rysy, porovnávat vzory, detekovat defekty, dekódovat čárové kódy nebo ověřovat kvalitu výrobků. Tyto operace musí často být dokončeny během zlomků sekundy, aby se udržely s rychlostmi výrobních linek.
Aplikace, které vyžadují rychlou inspekci a velké objemy obrazů, obvykle využívají vysoce výkonné procesory, velkou kapacitu paměti a pokročilé zpracovatelské hardwarové vybavení, aby snížily čas zpracování.
V průmyslových prostředích se běžně používají průmyslové PC, protože jsou navrženy tak, aby spolehlivě pracovaly v drsných podmínkách. Dokáží odolávat prachu, vibracím, teplotním výkyvům, vlhkosti a elektrickému rušení, což je činí vhodnými pro nepřetržitý provoz ve výrobě.
Software pro zpracování obrazu
Software pro zpracování obrazu je komponenta, která přetváří surová obrazová data na smysluplné inspekční výsledky.
Po obdržení snímku software analyzuje pomocí specializovaných algoritmů. Analýza často následuje sekvenci operací. Nejprve software vylepšuje obraz a odstraňuje zbytečný šum. Poté identifikuje důležité rysy, jako jsou okraje, tvary, vzory, znaky nebo barevné oblasti. Následně provádí měření, porovnání nebo úkoly klasifikace podle předem definovaných inspekčních pravidel.
Software může vykonávat široké spektrum funkcí, včetně dimenzionálního měření, polohování objektů, čtení čárových kódů, optického rozpoznávání znaků (OCR), detekce defektů, porovnávání vzorů a identifikace výrobků.
Jakmile je analýza dokončena, software generuje inspekční výsledky. Tyto výsledky mohou zahrnovat rozhodnutí o přijetí/odmítnutí, dimenzionální hodnoty, souřadnice objektu, identifikační kódy, místa defektů nebo příkazy pro řízení stroje.
Některé softwarové platformy jsou navrženy pro vysoce specializované inspekční úkoly, zatímco jiné poskytují flexibilní nástroje, které lze přizpůsobit různým aplikacím v oblasti výroby a zajištění kvality.
Řídicí jednotka včetně I/O, řízení pohybu a převodu úrovně
Řídicí jednotka spojuje systém strojového vidění s externím zařízením a umožňuje převádět inspekční výsledky na fyzické akce.
Po dokončení analýzy obrazu software odesílá inspekční data řídicí jednotce. Řídicí jednotka poté komunikuje se zařízeními, jako jsou PLC, roboty, dopravníky, aktuátory, řízení pohybu a I/O moduly.
V jednoduchých inspekčních systémech může řídicí jednotka odesílat pouze základní signál přijetí nebo odmítnutí. Například, když je detekován vadný produkt, výstupní signál může aktivovat mechanismus pro odmítnutí, který odstraní položku z výrobní linky.
Pokročilejší systémy vyžadují další řídicí schopnosti. V robotických aplikacích může systém strojového vidění vypočítat přesnou polohu a orientaci objektu a tyto souřadnice zaslat řídicímu robotu. Robot pak může upravit svou pohybovou cestu a provádět přesné operace pick-and-place, montáž nebo manipulaci.
Řídicí jednotka může také provádět převod úrovně signálů, čímž zajišťuje, že komunikační signály z vizuálního systému jsou kompatibilní s připojeným vybavením. Koordinací výměny dat a akcí strojů umožňuje řídicí jednotka automatizované reakce, jako je odmítání výrobků, robotické vedení, korekce poloh, synchronizace procesů a řízení výrobní linky.
Vlastnosti strojového vidění
Strojové vidění nabízí několik výhod oproti ručnímu inspekci, zejména v průmyslových prostředích, kde musí být výrobky kontrolovány rychle, přesně a konzistentně. Během ruční kontroly musí operátoři neustále sledovat součásti, porovnávat je s požadavky na kvalitu a rozhodovat se na základě toho, co vidí. Jak se zvyšuje objem výroby, stává se udržování stejné úrovně pozornosti a konzistence obtížnějším.
Strojové vidění řeší tyto výzvy pomocí digitálního snímání, automatizované analýzy a předem definovaných pravidel inspekce. Jakmile je systém nakonfigurován, každý výrobek prochází stejným inspekčním procesem a je hodnocen podle stejných standardů. To vede k vyšší přesnosti, lepší konzistenci, rychlejším rychlostem inspekce, objektivnějším výsledkům a nižším dlouhodobým operačním nákladům.
Přesnost
Jednou z nejdůležitějších silných stránek strojového vidění je jeho schopnost provádět měření a inspekce s vysokou přesností.
Mnoho průmyslových výrobků obsahuje prvky, které jsou extrémně malé a obtížně hodnotitelné přesně pouhým okem. Příklady zahrnují jemné elektronické obvody, mikrokomponenty, drobné otvory, úzké mezery, tištěné označení, pájecí spoje a povrchové nedokonalosti. I když se používají zvětšovací nástroje, ruční inspekce často závisí na individuálním vizuálním posouzení, což může zavádět variace v měření.
Systémy strojového vidění analyzují obrazy na úrovni pixelu. Po zachycení obrázku software identifikuje konkrétní hrany, rohy, vzory nebo referenční body a vypočítává rozměry na základě kalibrovaných měření. To umožňuje systému měřit vzdálenosti, průměry, úhly, polohy a povrchové vlastnosti s vysokou mírou přesnosti.
V aplikacích, jako je výroba elektroniky, výroba polovodičů, montáž lékařských přístrojů a precizní obrábění, může strojové vidění detekovat malé vady a rozměrové odchylky, které mohou být obtížně identifikovatelné pouze pomocí ruční inspekce. Tato úroveň přesnosti pomáhá zlepšit kvalitu výrobků a snižuje riziko, že vadné produkty dosáhnou pozdějších výrobních fází.
Opakovatelnost
Strojové vidění poskytuje vysoce konzistentní výsledky inspekce, protože každý čas dodržuje stejný inspekční postup.
Při ruční inspekci mohou různí operátoři hodnotit stejný výrobek různě. Dokonce i ten samý operátor může dospět k různým závěrům v různých časech v důsledku změn v koncentraci, pracovním zatížení nebo podmínkách pozorování. Tyto variace mohou ovlivnit celkovou konzistenci kontroly kvality.
Strojové vidění eliminuje velkou část této variability tím, že aplikuje předem definovaná pravidla inspekce a měřicí parametry na každý výrobek. Každý obrázek je zpracován pomocí stejné sekvence operací a každý výsledek je porovnán se stejnými akceptačními kritérii.
Například, pokud výrobek vyžaduje průměr otvoru v rámci specifického tolerančního rozsahu, systém měří tuto vlastnost stejnou metodou pro každou inspekční cyklus. Proces hodnocení zůstává nezměněn, ať už je inspektován první výrobek nebo desátý tisíc výrobek.
Tato vysoká úroveň opakovatelnosti pomáhá výrobcům udržovat jednotnou kvalitu výrobků, stabilní výrobní standardy a konzistentní výkonnost inspekce napříč velkými výrobními objemy.
Rychlost
Systémy strojového vidění mohou inspektovat výrobky výrazně rychleji než metody ruční inspekce.
V prostředí výroby se výrobky často pohybují nepřetržitě na dopravnících, indexovacích stolech nebo automatizovaných montážních systémech. Inspekce musí být dokončena v velmi krátkém období bez přerušení výrobního toku. Ruční inspekce se může stát úzkým hrdlem, když se rychlosti výroby zvyšují, zejména když je třeba zkontrolovat velké množství výrobků v omezeném čase.
Systémy strojového vidění jsou navrženy tak, aby tyto podmínky efektivně zvládaly. Jakmile objekt dosáhne inspekční pozice, senzor spouští kameru, obrázek je zachycen a zpracovatelský software okamžitě začíná analýzu. Měření, kontroly vad, porovnání vzorů a rozhodovací procesy lze často dokončit během milisekund.
Protože zachycení a analýza obrazu probíhá tak rychle, může strojové vidění inspektovat rychle se pohybující výrobky v reálném čase při udržení přesnosti inspekce. To umožňuje výrobcům udržovat vysoké výrobní zrychlení bez obětování kontroly kvality.

Objektivita
Strojové vidění poskytuje výsledky inspekce na základě měřitelných obrazových dat namísto osobní interpretace.
Během manuální inspekce mohou různé osoby hodnotit stejnou vadu odlišně. Faktory, jako je úroveň zkušeností, vizuální vnímání, pracovní tlak, světelné podmínky a únava, mohou ovlivnit rozhodnutí. Výsledkem je, že hraniční vady mohou být někdy akceptovány jedním inspektorem a odmítnuty jiným.
Strojové vidění se řídí naprogramovanými kritérii inspekce. Systém analyzuje rysy obrazu, porovnává naměřené hodnoty s předdefinovanými limity a generuje výsledky podle stanovených pravidel. Každé rozhodnutí je založeno na zachycených obrazových datech, číselných měřeních a naprogramovaných prahem.
Protože proces hodnocení nezávisí na osobním posouzení, výsledky inspekce zůstávají konzistentnější napříč různými směnami, výrobními šaržemi a provozními podmínkami. Tato objektivita pomáhá zlepšovat zajištění kvality, kontrolu procesů a sledovatelnost produktu.
Nákladová efektivita
Strojové vidění může dlouhodobě výrazně snížit náklady na inspekci při zvýšení celkové výrobní efektivity.
V manuálních inspekčních procesech může být vyžadováno několik operátorů, kteří neustále inspekcí zboží v průběhu výrobní směny. Další pracovní síla může být také potřebná k opětovné kontrole pochybných produktů nebo provádění opakovaných měření. Jak se zvyšuje objem výroby, náklady na práci a pracovní zátěž spojená s inspekcí obvykle také rostou.
Automatizovaný systém strojového vidění může tyto úkoly provádět nepřetržitě s minimálním přerušením. Jakmile je nainstalován a nakonfigurován, systém může inspekčně zpracovávat velké množství produktů, přičemž udržuje stejné standardy inspekce. To snižuje potřebu opakované manuální inspekce a umožňuje personálu soustředit se na úkoly, které vyžadují technickou odbornost nebo zlepšení procesů.
I když počáteční investiční náklady na kamery, osvětlení, software a zpracovatelská zařízení mohou být relativně vysoké, dlouhodobé výhody často převyšují počáteční výdaje. Mezi tyto výhody patří vyšší produktivita, nižší náklady na práci, snížené chyby při inspekci, méně vadných produktů, méně materiálového odpadu a zlepšená výrobní efektivita.
V důsledku toho je strojové vidění často vnímáno nejen jako nástroj pro kontrolu kvality, ale také jako technologie, která podporuje snižování nákladů, optimalizaci procesů a dlouhodobý provozní výkon.
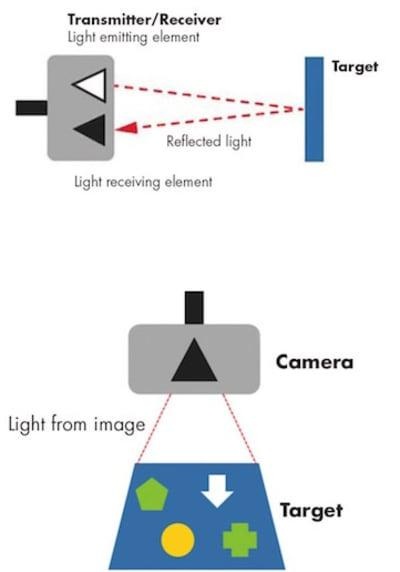
Pracovní princip vizuálních senzorů
Jak vizuální senzory shromažďují a analyzují informace
Vizuální senzor je zařízení, které zachycuje obrázky objektu a přetváří tyto obrázky na užitečná inspekční data. Slouží jako první etapa procesu strojového vidění, protože všechna měření a výsledky inspekce závisí na kvalitě zachyceného obrazu.
V průmyslových aplikacích se vizuální senzory používají k získání informací o velikosti, poloze, tvaru, orientaci, ploše, umístění okrajů a těžišti objektu. Tyto informace pomáhají určit, zda produkt splňuje požadavky na kvalitu, zda je správně umístěn pro další zpracování, nebo zda by měl být přijat, či odmítnut.
Proces začíná, když objekt vstoupí do zorného pole senzoru. Světlo z dedikovaného osvětlení nebo z okolního prostředí se odráží od povrchu objektu a cestuje skrze optický systém senzoru. Optické komponenty zaostřují toto odražené světlo na obrazový senzor, čímž vytvářejí digitální reprezentaci objektu.
Tvorba obrazu a detekce založená na pixelech
V jádru vizuálního senzoru se nachází obrazový senzor složený z tisíců nebo milionů jednotlivých pixelů. Každý pixel sbírá světlo z velmi malé oblasti objektu a zaznamenává informace o intenzitě světla a v některých případech o barvě.
Když je obraz zachycen, každý pixel ukládá číslenou hodnotu odpovídající množství světla, které přijímá. Světlé oblasti produkují vyšší hodnoty pixelů, zatímco tmavší oblasti produkují nižší hodnoty. Tyto pixelové hodnoty společně tvoří kompletní digitální obraz objektu.
Množství detailů viditelných v obraze závisí převážně na rozlišení senzoru, které je určeno počtem dostupných pixelů. Senzor s vyšším rozlišením dělí obraz na více měřicích bodů, což umožňuje přesnější zachycování a měření menších rysů.
Například při inspekci tištěné desky obvodů může nízké rozlišení obrazu zobrazit pouze obecný obrys komponentů. Vysoké rozlišení obrazu může odhalit mnohem jemnější detaily, jako jsou úzké vodiče, malé pájecí spoje, miniaturní značky zarovnání nebo drobné povrchové vady. Tento dodatečný detail zlepšuje přesnost měření a schopnost detekce vad.
Zpracování obrazu a extrakce rysů
Jakmile je obraz zachycen, vizuální senzor začíná zpracovávat datové informace o obraze. Prvním krokem bývá často zlepšení kvality obrazu snížením šumu, zvýšením kontrastu a oddělením objektu od pozadí. Tyto operace pomáhají zajistit, aby byly důležité rysy jasněji identifikovány.
Senzor poté analyzuje specifické charakteristiky obrazu. Může lokalizovat hrany, identifikovat geometrické tvary, vypočítat rozměry, určit orientaci objektu, měřit vzdálenosti nebo najít středový bod cíle. Během této fáze systém převádí surové informace o pixelech na smysluplná měřicí data.
Extrahované informace jsou porovnány se uloženými referenčními obrazy, předdefinovanými standardy, tolerančními limity nebo kritérii inspekce. Proces porovnávání určuje, zda objekt odpovídá očekávaným požadavkům.
Například systém může ověřit, zda je etiketa správně umístěna, zda je komponent správně vyrovnán, zda průměr otvoru spadá do tolerance, nebo zda povrch obsahuje viditelné defekty. Proces hodnocení dodržuje stejná naprogramovaná pravidla pro každý inspekční cyklus, čímž zajišťuje konzistentní výsledky.
Výstupní výsledky a rozhodování
Po dokončení analýzy vytvoří vizuální senzor výsledky inspekce, které mohou být použity operátory, stroji nebo řídicími systémy.
V závislosti na aplikaci může výstup zahrnovat výsledky detekce objektu, polohové souřadnice, rozměrová měření, informace o orientaci, umístění defektů, identifikační data nebo rozhodnutí o úspěchu/neúspěchu. Tyto výsledky mohou být zobrazeny na monitorovacím systému, uloženy pro záznamy kvality nebo přímo přenášeny do výrobního zařízení.
V automatizovaných výrobních systémech je výstup často používán okamžitě. Například robot může přijmout polohové souřadnice pro operaci pick-and-place, dopravní systém může odmítnout vadný produkt nebo výrobní stroj může upravit své provozní parametry na základě výsledků měření.
Hlavní komponenty vizuálního senzoru
Vizuální senzor integruje více technologií do kompaktního systému schopného zachycovat, zpracovávat a přenášet datové informace o obraze. Aby tyto funkce byly prováděny přesně a spolehlivě, několik komponent spolupracuje během celého inspekčního procesu.
Optické komponenty
Optické komponenty směrují a zaostřují světlo z objektu na obrazový senzor. Tyto komponenty mohou zahrnovat čočky, filtry, zrcadla a ochranné optické prvky. Jejich účelem je vytvořit ostrý a stabilní obraz, který zachovává důležité vizuální detaily.
Laserové jednotky
Mnoho vizuálních senzorů používá laserové emitery k vytváření přesných světelných vzorů nebo referenčních čar. Tyto laserové projekce usnadňují měření vzdáleností, detekci profilů objektů a vytváření informací o trojrozměrných površích.
Skenovací motory a skenovací mechanismy
V aplikacích, které vyžadují skenování plochy nebo měření profilů, se skenovací motory a skenovací mechanismy pohybují optickými komponenty nebo usměrňují skenovací dráhu přes cíl. Tento kontrolovaný pohyb umožňuje senzoru shromažďovat datové informace o obraze z různých pozic a vytvářet úplnou reprezentaci objektu.
Úhlové senzory
Úhlové senzory monitorují rotační pozici a pohyb v rámci skenovacího systému. Pomáhají udržovat přesnost měření tím, že zajišťují, že skenovací komponenty fungují pod správným úhlem a polohou po celou dobu inspekčního procesu.
Lineární CCD senzory
Mnoho systémů vizuálního snímání používá lineární CCD (Charge-Coupled Device) senzory k zachycování informací o obraze jeden řádek po druhém. Jak se pohybuje buď objekt, nebo skenovací systém, jsou shromažďovány a kombinovány po sobě jdoucí obrazové linie za účelem vytvoření úplného obrazu. Tento přístup je běžně používán v aplikacích rychlostní inspekce a skenování povrchů.
Ovladače senzorů a elektrické řídicí obvody
Ovladače senzorů a řídicí elektronika regulují činnost obrazových senzorů, laserů, skenovacích zařízení a komunikačních rozhraní. Řídí časování signálu, koordinují akvizici dat a zajišťují stabilní výkon systému během nepřetržitého provozu.
Význam vizuálních senzorů v strojovém vidění
Vizuální senzory jsou základní součástí systémů strojového vidění, protože poskytují datové informace o obrazu, které jsou potřebné pro všechny následné analýzy a rozhodovací procesy. Bez přesného zachycení obrazu nejsou spolehlivá měření a inspekce možné.
Kombinací optické technologie, elektronického obvodu, zařízení pro snímání obrazu, skenovacích mechanizmů a zpracovatelských funkcí mohou vizuální senzory rychle a konzistentně zachytit podrobné informace o objektech. Tato schopnost je činí nezbytnými pro aplikace, jako je kontrola kvality, robotické řízení, měření rozměrů, identifikace objektů, automatizovaná montáž a řízení průmyslových procesů.
Implementace vizuálních senzorů
Vizuální senzory jsou bezkontaktní inspekční zařízení, která kombinují zobrazovací hardware, optické komponenty, elektronické obvody a technologii zpracování obrazu do jednoho systému. Na rozdíl od měřicích nástrojů, které pracují na základě kontaktu, vizuální senzory nemusí se dotýkat objektu, který se inspektuje. Informace jsou shromažďovány zachycením a analyzováním světla odraženého od povrchu objektu.
Tento bezkontaktní přístup je obzvláště cenný v automatizovaných výrobních prostředích. Produkty mohou pokračovat v pohybu po dopravníku, otáčet se na držáku nebo být zpracovávány robotem, zatímco se provádějí měření a inspekce. Jelikož není vyžadován fyzický kontakt, není zde riziko poškrábání jemných povrchů, deformování měkkých materiálů nebo přerušení výrobního procesu.
V robotických aplikacích vizuální senzory poskytují informace potřebné k lokalizaci objektů, ověřování poloh, měření rozměrů, identifikaci charakteristik a řízení automatizovaných pohybů. K dosažení těchto úkolů obvykle robotické vidicí systémy spoléhají na tři hlavní přístupy měření: zpracování jasových obrazů, zpracování binárních obrazů a měření na základě vzdálenosti.
Zpracování jasových obrazů: Použití intenzity světla k extrakci rysů objektu
Zpracování jasových obrazů je jednou z nejvíce používaných metod v systémech strojového vidění. Proces začíná, když kamera zachytí obraz cílového objektu za řízených podmínek osvětlení.
Každá oblast obrazu obsahuje hodnotu jasu, která odpovídá množství odraženého světla dosaženého na snímač obrazu. Hladké povrchy, tištěné značky, hrany, otvory, škrábance a další prvky často odrážejí světlo různými způsoby, což vytváří variace v jasu po celém obrazu.
Po pořízení obrazu kamera převádí optický obraz na digitální pixelová data. Každý pixel ukládá číselnou hodnotu jasu, což umožňuje systému analyzovat obraz matematicky. Software pro zpracování obrazu poté zkoumá tyto hodnoty, aby identifikoval důležité vizuální rysy.
Během analýzy může systém lokalizovat hrany, rohy, přímky, křivky, vzory, tištěné znaky, povrchové vady a hranice objektu. Například při inspekci mechanické součásti mohou změny jasu odhalit obrys otvoru, hranu obráběného povrchu nebo místo vyryté značky.
Protože obraz v odstínech šedi může obsahovat velké množství dat, zpracování každé úrovně jasu může vyžadovat značné výpočetní zdroje. V aplikacích s vysokou rychlostí se často používají další zpracovatelské techniky pro snížení výpočetní zátěže a zlepšení rychlosti inspekce.
Zpracování binárních obrazů: Zjednodušení obrazů pro rychlejší analýzu
Zpracování binárních obrazů se běžně používá, když je cílem rychle a efektivně oddělit objekt od pozadí.
Proces začíná převodem obrazu v odstínech šedi na binární obraz, kde je každému pixelu přiřazena jedna ze dvou možných hodnot. Pixely jsou klasifikovány jako černé nebo bílé na základě zvoleného prahu jasu. Oblasti jasnější než práh získávají jednu hodnotu, zatímco tmavší oblasti získávají druhou.
Tento převod dramaticky zjednodušuje obraz. Místo analýzy stovek úrovní jasu systém potřebuje pouze rozlišit mezi dvěma oblastmi. Výsledkem jsou rychlejší výpočty a snadnější identifikace rysů objektu.
Jakmile je objekt oddělen od pozadí, systém může provádět další měření. Může vypočítat plochu objektu, šířku, výšku, obvod, orientaci, středovou polohu nebo geometrický tvar. Může také počítat objekty, ověřovat přítomnost nebo nepřítomnost a detekovat chybějící komponenty.
Například na montážní lince může zpracování binárních obrazů rychle určit, zda je díl přítomen na správném místě, než začíne další výrobní krok. Díky své rychlosti a jednoduchosti je tato metoda široce používána v inspekcích s vysokým objemem a automatizovaných třídicích aplikacích.
Měření na základě vzdálenosti: Měření polohy a tvaru ve třech dimenzích
Některé aplikace vyžadují více než dvourozměrný obraz. V těchto situacích musí systém určit, jak daleko je objekt od senzoru, a změřit jeho tvar ve třech dimenzích. Metody měření na základě vzdálenosti jsou navrženy pro tento účel.
Proces zahrnuje shromažďování informací o fyzické vzdálenosti mezi snímačem a různými body na povrchu objektu. Pomocí těchto informací může systém vypočítat výšku, hloubku, kontury, orientaci a prostorovou polohu.
Jedním z běžných přístupů je triangulační měření. V této metodě je na povrch objektu prozářen laserový paprsek nebo strukturovaný světelný vzor. Odražené světlo je pozorováno z jiného úhlu kamerou nebo snímačem. Analyzováním geometrického vztahu mezi světelným zdrojem, objektem a kamerou systém vypočítá vzdálenost k konkrétním povrchovým bodům.
Dalším široce používaným přístupem je stereovize. Tato technika používá dvě kamery umístěné na různých místech, podobně jako lze odhadnout hloubku z dvou různých pohledových úhlů. Obě kamery simultánně snímají obrázky stejného objektu. Systém porovnává odpovídající rysy obrázků a vypočítává informace o hloubce na základě rozdílů mezi těmito dvěma pohledy.
Měření na základě vzdálenosti umožňuje vizuálním snímačům generovat trojrozměrná data, což usnadňuje inspekci složitých tvarů, měření profilů objektů, odhad objemu a určení přesných poloh objektů.
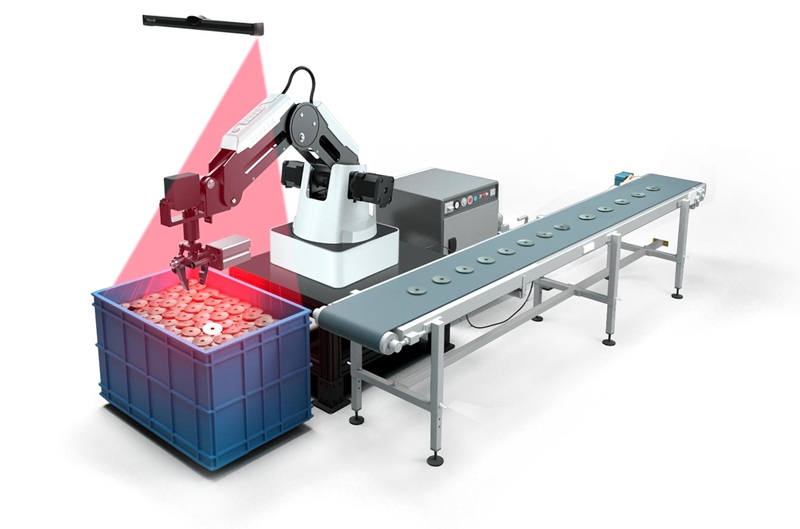
Tyto schopnosti jsou zvláště důležité v aplikacích, jako je robotické vybírání, automatizovaná montáž, paletizace, vybírání z kontejnerů, rozměrová inspekce a 3D kontrola kvality.
Podpora detekce objektů a robotického řízení
Tři měřicí přístupy se často používají společně v rámci jednoho vizuálního systému. Obraz jasu může být použit k identifikaci povrchových rysů, binární zpracování může isolovat objekt od jeho pozadí a měření vzdálenosti může poskytnout trojrozměrná data o poloze.
Kombinováním těchto technik mohou vizuální snímače vykonávat širokou škálu průmyslových úkolů. Mohou detekovat objekty, měřit rozměry, rozpoznávat tvary, sledovat pohyb, ověřovat kvalitu montáže, určovat orientaci objektu a poskytovat informace o poloze pro robotické systémy.
Výsledkem je, že vizuální snímače se staly nezbytnými komponenty v moderní automatizaci. Jejich schopnost shromažďovat přesné vizuální informace bez fyzického kontaktu umožňuje rychlejší inspekce, spolehlivější měření, zlepšenou kontrolu procesů a přesné robotické řízení v široké škále výrobních a průmyslových aplikací.
Srovnání fotoelektrických a vizuálních senzorů
Pochopení rozdílu mezi oběma technologiemi
Fotoelektrické senzory a vizuální senzory jsou obě používány k detekci a sledování objektů v automatizovaných systémech, ale výrazně se liší v množství informací, které mohou shromáždit a zpracovat.
Fotoelektrický senzor je navržen především k určení, zda je objekt přítomen nebo nepřítomen na konkrétním místě. Jeho provoz je relativně jednoduchý. Světelný paprsek je emitován směrem k cílové oblasti a senzor monitoruje, zda je tento paprsek odražen, přerušen, nebo přijat. Na základě tohoto signálu systém určuje, zda objekt vstoupil do detekční zóny.
Tato metoda je účinná pro základní úkoly snímání, jako je počítání produktů na dopravním pásu, detekce příjezdu balíčku, potvrzení přítomnosti součásti nebo spuštění dalšího kroku v produkčním procesu. Informace, které poskytuje, jsou však obecně omezeny na jednoduchý výsledek detekce.
Vizuální senzory pracují na mnohem vyšší úrovni inspekce. Místo spoléhání se na jediný světelný signál snímají úplný obrázek objektu a simultánně analyzují více vizuálních rysů. To umožňuje systému shromáždit podrobné informace o objektu, místo aby pouze potvrdil jeho přítomnost.
Možnosti inspekce
Největší rozdíl mezi fotoelektrickými senzory a vizuálními senzory je v množství informací, které mohou být během inspekce extrahovány.
Fotoelektrický senzor obvykle může odpovědět na základní otázku, jako je to, zda je objekt přítomen, nepřítomen nebo umístěn v detekční oblasti. I když je to dostatečné pro mnoho jednoduchých automatizačních úkolů, neposkytuje informace o stavu nebo charakteristikách objektu.
Vizuální senzor může provádět mnohem komplexnější inspekce. Po zachycení obrázku může systém analyzovat tvar, velikost, polohu, orientaci, barvu, stav povrchu, značení, vzory, rozměry a montážní rysy v rámci stejného inspekčního cyklu.
Například vezměte v úvahu produkt pohybující se po dopravním pásu. Fotoelektrický senzor může pouze potvrdit, že produkt dorazil na inspekční stanici. Vizuální senzor může určit, zda je produkt správným modelem, ověřit jeho rozměry, zkontrolovat umístění štítků, potvrdit správnou montáž, identifikovat vady na povrchu a změřit jeho polohu pro robotické manipulace.
Protože z jediné fotografie může být provedeno více inspekcí, vizuální senzory poskytují výrazně více inspekčních schopností v rámci jednoho systému.
Snížení hardwarových požadavků
V tradičních automatizačních systémech bylo často potřeba více fotovoltaických senzorů k provedení série inspekčních úloh.
Například jeden senzor by mohl detekovat přítomnost produktu, jiný by mohl ověřit výšku, třetí by mohl potvrdit orientaci a další senzory by mohly být nainstalovány pro kontrolu polohy nebo počtu produktů. Jak se požadavky na inspekci zvyšovaly, počet senzorů, upevňovacích držáků, kabelů a bodů pro nastavení se často také zvyšoval.
Vizuální senzory často mohou nahradit mnoho z těchto jednotlivých zařízení. Jeden snímek z kamery obsahuje velké množství informací, které mohou být analyzovány současně. Místo instalace několika samostatných detekčních zařízení může jeden vizuální senzor provádět více inspekčních funkcí v rámci jednoho integrovaného systému.
Toto snížení hardwaru může zjednodušit návrh systému, snížit složitost kabeláže, minimalizovat instalační prostor a snížit požadavky na údržbu.
Přizpůsobení změnám polohy a orientace
Jednou z nejdůležitějších výhod vizuálních senzorů je jejich schopnost zvládat variace v poloze a orientaci objektu.
V mnoha aplikacích fotovoltaického snímání musí objekty procházet konkrétní lokalitou se stálým zarovnáním. Pokud se poloha objektu posune mimo dosah detekce senzoru, může dojít k nesprávným údajům. Aby se tomuto problému předešlo, výrobci často používají vodicí kolejnice, držáky, polohovací mechanismy nebo další senzory k udržení konzistentního umístění objektu.
Vizuální senzory poskytují větší flexibility, protože kontrolují celý obraz místo spoléhání se na jediný detekční bod. Když se objekt mírně pohne v rámci zorného pole kamery, algoritmy zpracování obrazu často dokážou lokalizovat objekt a pokračovat v inspekčním procesu.
Například, pokud balíček dorazí mírně mimo svou očekávanou polohu, vizuální senzor může identifikovat balíček v obraze, určit jeho skutečnou polohu a provést potřebná měření pomocí té aktualizované polohy. Tato schopnost snižuje závislost na vysoce přesných mechanických polohovacích systémech.
Výsledkem je, že vizuální senzory jsou obzvláště cenné v aplikacích, kde mohou produkty dorazit s malými variacemi v umístění, rotaci nebo orientaci.
Softwarová flexibilita a změny produktů
Další velkou výhodou vizuálních senzorů je jejich flexibilita založená na softwaru.
V mnoha fotovoltaických systémech mohou změny požadavků na výrobu vyžadovat fyzické úpravy. Nové senzory mohou potřebovat instalaci, upevňovací pozice mohou potřebovat úpravy nebo detekční nastavení mohou potřebovat přeKalibraci. Tyto změny mohou prodloužit dobu nastavení a složitost systému.
Vizuální senzory mohou často být přizpůsobeny prostřednictvím softwarové konfigurace. Parametry inspekce, limity měření, referenční vzory a kritéria přijetí mohou být aktualizovány bez významných změn hardwaru.
Například výrobní linka může vyrábět několik modelů produktů, které se liší velikostí, tvarem, designem štítků nebo uspořádáním komponent. Místo nahrazování senzorů nebo přepracovávání inspekční stanice mohou operátoři vybrat jiný inspekční program nebo načíst nový recept na produkt. Vizuální senzor pak aplikuje příslušná inspekční pravidla pro tento produkt.
Tato flexibilita činí vizuální senzory vhodné pro výrobní procesy s vysokou variabilitou, časté změny produktů, přizpůsobenou výrobu a moderní automatizované výrobní systémy.
Shrnutí klíčových výhod
Zatímco fotovoltaické senzory zůstávají vysoce účinné při jednoduchých detekčních úlohách, vizuální senzory poskytují mnohem širší spektrum inspekčních schopností.
Zachycením a analýzou obrazů mohou vizuální senzory vyhodnocovat více charakteristik produktů současně, což snižuje potřebu mnoha jednotlivých detekčních zařízení. Mohou se přizpůsobit variacím v poloze objektu, podporovat rychlé změny produktů prostřednictvím softwarového nastavení a provádět podrobné inspekce, které daleko přesahují jednoduchou detekci přítomnosti.
Z těchto důvodů se vizuální senzory staly stále důležitější technologií v robotice, automatizované inspekci, kvalitativní kontrole, balicích systémech, montážních operacích a pokročilých výrobních prostředích, kde jsou flexibilita, přesnost a informace bohaté inspekce zásadní.
Aplikace strojového vidění a vizuálních senzorů
Strojové vidění a vizuální senzory se používají v aplikacích, kde je třeba detekovat, identifikovat, měřit, inspektovat, klasifikovat, umisťovat nebo sledovat objekty. Zachycením obrazů a jejich automatickou analýzou mohou tyto systémy vykonávat inspekční a měřicí úkoly rychlostí a úrovní konzistence, které je obtížné dosáhnout manuálními metodami.
Typický proces začíná akvizicí obrazu. Kamery zachycují obrazy cílového objektu a software pro zpracování obrazů extrahuje důležité vizuální informace. Systém poté porovnává shromážděná data s přednastavenými standardy, referenčními obrázky nebo měřicími kritérii. Na základě výsledků může generovat inspekční rozhodnutí, poskytovat měřicí data, spouštět alarmy, řídit roboty nebo ovládat výrobní zařízení.
Protože strojové vidění funguje bez fyzického kontaktu, je dobře přizpůsobeno pro aplikace, které zahrnují křehké produkty, výrobní linky s vysokou rychlostí, nebezpečné prostředí a úkoly přesného měření. Jeho kombinace rychlosti, přesnosti, opakovatelnosti a automatizační schopnosti vedla k širokému přijetí ve mnoha průmyslových odvětvích.
Zemědělství
Zemědělství je jednou z rostoucích aplikačních oblastí pro strojové vidění. Moderní zemědělské operace stále více spoléhají na vizuální senzory, aby zlepšily kvalitu produktů, snížily požadavky na pracovní sílu a podpořily rozhodování na základě dat.
Strojové vidění se běžně používá pro:
• Inspekci kvality ovoce
• Hodnocení zralosti ovoce
• Monitorování růstu plodin
• Detekci plevele
Při třídění ovoce se produkty pohybují po dopravníku, zatímco několik kamer zachycuje obrazy z různých úhlů. Tento přístup vícero pohledů umožňuje systému prozkoumat větší část povrchu ovoce během jednoho inspekčního cyklu.
Například v systému třídění jablek kamery zachycují obrazy, jak se jablka otáčejí nebo pohybují přes inspekční stanici. Software analyzuje barvu povrchu, tvar, velikost, pohmožděniny, vady, praskliny a další viditelné defekty. Na základě předdefinovaných třídících standardů je každé jablko automaticky přiřazeno do příslušné kategorie kvality.
Strojové vidění může také podpořit správu plodin. Obrázky shromážděné z kamer namontovaných na traktorech, dronech nebo systémech pro monitorování polí mohou být použity k vyhodnocení růstu plodin, identifikaci nezdravých rostlin, odhadu úrovně zralosti a lokalizaci plevele v kultivovaných oblastech.
Navzdory těmto výhodám představují zemědělské aplikace jedinečné výzvy. Venkovní prostředí často zahrnují měnící se sluneční podmínky, stíny, variace počasí, složité pozadí, prach a přirozené rozdíly mezi rostlinami. Tyto faktory mohou ovlivnit kvalitu obrazu a přesnost inspekce. V důsledku toho pokračuje výzkum, který má za cíl zlepšit spolehlivost a robustnost systémů strojového vidění za skutečných polních podmínek.
Průmyslová výroba
Průmyslová výroba je jednou z nejzavedenějších a nejširších oblastí strojového vidění.
V výrobním prostředí se produkty pohybují několika výrobními fázemi a musí být opakovaně inspektovány, aby byla zajištěna kvalita a konzistence. Manuální inspekce může být obtížná, když jsou produkty malé, výrobní rychlosti vysoké nebo kritéria inspekce složitá. Strojové vidění se zaměřuje na tyto výzvy tím, že provádí inspekce automaticky a konzistentně během celého výrobního procesu.
Strojové vidění se široce používá pro:
• Identifikaci produktů
• Inspekci štítků
• Detekci vad na PCB
• Inspekci obalů
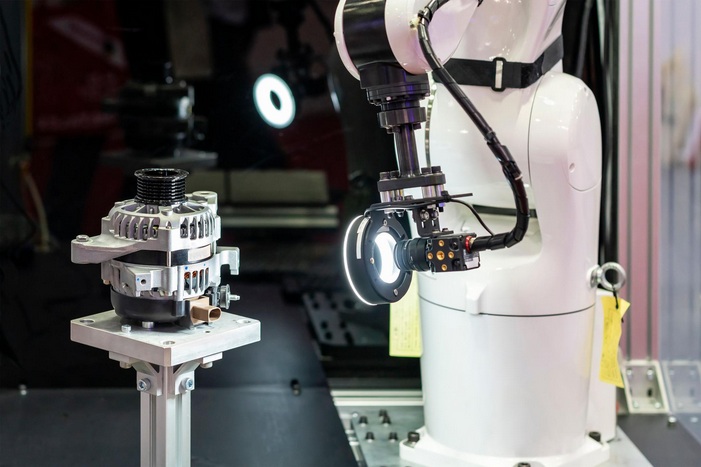
• Inspekci automobilových komponentů
• Inspekci polovodičů
• Monitorování výroby potravin
Pro identifikaci produktů může systém číst čárové kódy, QR kódy, sériová čísla a tištěné znaky, aby ověřil informace o produktech. Při inspekci štítků kamery kontrolují, zda jsou štítky přítomny, správně umístěny a správně tištěny.
Ve výrobě tištěných spojů (PCB) strojové vidění kontroluje pájecí spoje, umístění komponentů, vodivé stopy a přesnost montáže. Malé vady, které mohou být obtížně identifikovatelné manuální inspekcí, lze často rychle odhalit prostřednictvím automatizované analýzy obrazu.
Aplikace pro balení využívají strojové vidění k ověření integrity balení, potvrzení počtu produktů, inspekci těsnění, kontrole úrovně výplně a zajištění správnosti informací o balení. V automobilovém a polovodičovém průmyslu provádí strojové vidění vysoce přesná měření rozměrů a inspekce vad, aby udrželo přísné standardy kvality.
V prostředích výroby potravin vizuální senzory monitorují vzhled produktů, konzistenci barvy, velikost, tvar a kvalitu balení, zatímco podporují provozy s vysokou rychlostí výroby.
Tyto schopnosti pomáhají zlepšit kontrolu kvality, výrobní efektivitu, sledovatelnost, konzistenci procesů a flexibilitu výroby.
Minerální zpracování
Strojové vidění se také používá v minerálním zpracování a sledování flotace, kde vizuální informace mohou poskytnout cenné poznatky o výkonu procesu.
V systémech flotace se bubliny tvoří na povrchu nádrží pro separaci minerálů. Velikost, tvar, barva, hustota a pohyb těchto bublinek často odrážejí účinnost separačního procesu.
Kamery nepřetržitě snímají obraz flotace, zatímco software pro zpracování obrazu analyzuje charakteristiky bublinek. Shromážděná data pomáhají operátorům vyhodnotit podmínky procesu a určit, zda jsou potřeba úpravy.
Sledováním struktury bubliny, rozložení barev, textury povrchu a vzorců pohybu mohou systémy strojového vidění podporovat lepší kontrolu procesů, zlepšovat míru recyklace minerálů a zvyšovat provozní efektivitu.
Doprava a bezpečnost
Strojové vidění hraje důležitou roli v moderních dopravních a bezpečnostních systémech.
V inteligentních dopravních systémech (ITS) kamery nepřetržitě sledují silnice, křižovatky, mýtné stanice a dopravní pruhy. Pořízené obrázky jsou analyzovány za účelem identifikace vozidel, počítání dopravního toku, detekce porušení jízdních pruhů, rozpoznávání registračních značek a sledování podmínek na silnici.
Technologie vizuálního snímání se také široce používají v bezpečnostních a dozorových systémech. Kamery sledují chráněné oblasti a poskytují obrazová data pro činnosti, jako je kontrola přístupu, monitorování obvodu, sledování objektů a detekce událostí.
Zpracováním velkého objemu vizuálních informací automaticky pomáhá strojové vidění zlepšovat provozní efektivitu a podporuje rychlejší reakce na měnící se podmínky.
Lékařské zobrazování
Lékařské zobrazování je další důležitou aplikační oblastí pro technologii strojového vidění.
Moderní zdravotnické systémy generují velké množství lékařských obrazů, které vyžadují pečlivou analýzu. Strojové vidění pomáhá zdravotnickým profesionálům vylepšováním obrázků, identifikací důležitých struktur a podporou diagnostických hodnocení.
Techniky strojového vidění se běžně aplikují na:
• rentgenové snímky
• skeny magnetické rezonance (MRI)
• snímky výpočetní tomografie (CT)
Proces analýzy často zahrnuje detekci anatomických struktur, měření rozměrů, zvýrazňování abnormalit a porovnávání rysů obrazu s známými lékařskými vzory. Tyto nástroje pomáhají zlepšovat efektivitu interpretace obrazů a podporují přesnější klinické hodnocení.
Jak technologie lékařského zobrazování nadále pokročují, strojové vidění se stává stále důležitějším v diagnostické podpore, plánování léčby a výzkumu ve zdravotnictví.
Vědecký výzkum
Vědecký výzkum často vyžaduje pozorování a analýzu objektů, které jsou příliš malé, příliš četné nebo příliš komplexní na to, aby byly efektivně hodnoceny manuálními metodami. Strojové vidění poskytuje výzkumníkům automatizované nástroje pro akvizici obrazů, měření a klasifikaci.
Aplikace zahrnují:
• analýzu materiálů
• biologickou analýzu
• chemickou analýzu
• výzkum životních věd
• počítání a klasifikaci krvinek
• analýzu chromozomů
• identifikaci rakovinných buněk
V biologických laboratořích mohou systémy strojového vidění zachytit mikroskopické obrazy a automaticky identifikovat specifické typy buněk. Během analýzy krve může systém počítat buňky, měřit charakteristiky buněk a klasifikovat různé kategorie buněk. V genetickém a lékařském výzkumu techniky zpracování obrazů pomáhají s analýzou chromozomů a identifikací abnormálních buněčných struktur.
Výzkumníci také používají strojové vidění k analýze povrchů materiálů, pozorování chemických reakcí a shromažďování kvantitativních dat z experimentů. Automatizovaná analýza obrazů zlepšuje konzistenci měření a umožňuje účinnější zpracování velkých datových sad.
Výhody napříč různými průmysly
Široká škála aplikací strojového vidění ukazuje jeho hodnotu jak v průmyslových, tak neprůmyslových prostředích.
Kombinováním akvizice obrazů, automatizované analýzy, měření, rozpoznávání vzorů a rozhodovacích funkcí mohou systémy strojového vidění transformovat vizuální informace na použitelné údaje. Tato schopnost podporuje efektivnější inspekční, monitorovací a kontrolní procesy.
Ať už se používá v zemědělství, výrobě, minerálním zpracování, dopravě, bezpečnosti, zdravotní péči nebo vědeckém výzkumu, strojové vidění pomáhá zlepšovat přesnost, efektivitu, konzistenci, produktivitu a kvalitu rozhodování. Tyto výhody učinily strojové vidění a vizuální senzory nezbytnými technologiemi v moderní automatizaci a inteligentních systémech.
Historie vývoje a evoluce vizuálních senzorů
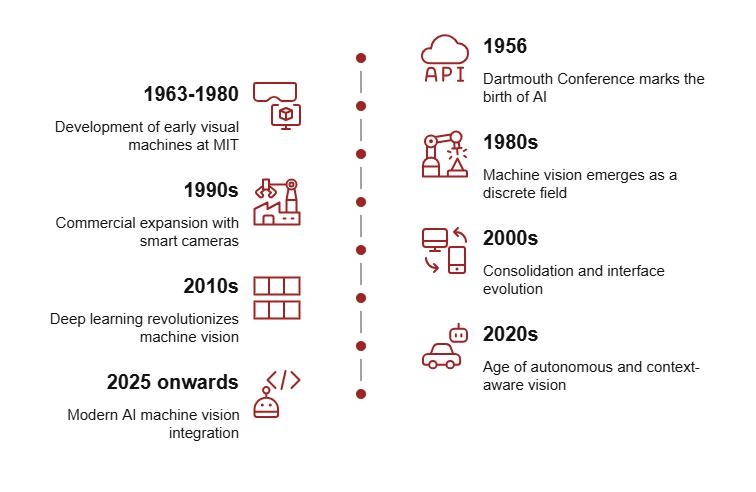
Raný vývoj technologie vizuálních senzorů
Technologie vizuálních senzorů začala vynořovat na konci 50. let 20. století, když pokroky v elektronice, zobrazovacích zařízeních a počítačových systémech vytvořily nové možnosti pro automatizovanou inspekci a strojové vnímání. Vědci hledali metody, které by umožnily strojům sbírat vizuální informace z jejich okolí a využívat tyto informace k podpoře automatizovaných operací.
Rané vizuální systémy byly relativně jednoduché a byly omezeny schopnostmi dostupných kamer, procesorového hardwaru a úložných zařízení. Získávání obrazů bylo pomalé, výpočetní zdroje byly omezené a bylo možné provádět pouze základní funkce analýzy obrazu. Navzdory těmto omezením položily tyto rané vývoje základy moderní technologie strojového vidění.
Jak počítače získávaly větší výkon a technologie obrazových senzorů se zlepšovala, vizuální senzory postupně přešly z laboratorních výzkumných projektů na praktické průmyslové nástroje.
Vznik výzkumu robotického vidění
Během 60. let se výzkumné úsilí rozšířilo směrem k robotickému vidění, zaměřenému na umožnění strojům rozpoznávat a interagovat s objekty v jejich prostředí. Rané studie obvykle zahrnovaly kontrolovaná vnitřní prostředí obsahující objekty s jednoduchými tvary a předvídatelnými polohami.
Vědci vyvinuli techniky pro detekci okrajů, identifikaci geometrických tvarů, oddělení objektů od pozadí a stanovení polohy objektů v rámci obrazu. Tyto zkoumání představily mnoho konceptů, které zůstávají základními pro moderní strojové vidění, včetně segmentace obrazu, extrakce funkcí, rozpoznávání objektů a analýzy vzorů.
I když výpočetní omezení omezovala schopnosti systému, toto období znamenalo začátek strojového vnímání a poskytlo základ pro budoucí technologie automatizace.
Expanze do průmyslových aplikací
V 70. letech zlepšení v elektronice a výpočetní technologii učinilo vizuální senzory stále praktickými pro průmyslové využití. Výrobci začali přijímat systémy strojového vidění pro inspekční a měřicí úkoly, které byly opakované, pracně náročné nebo obtížně proveditelné prostřednictvím manuální inspekce.
Některé z nejranějších průmyslových aplikací zahrnovaly:
• Výroba integrovaných obvodů
• Precizní elektronická montáž
• Inspekce balení nápojů
• Automatizované systémy kontroly kvality
V produkci polovodičů byly vizuální systémy používány k inspekci jemných vzorů obvodů a identifikaci výrobních vad. Při operacích elektronického montáže ověřovaly umístění a zarovnání komponentů. Balení systémy používaly strojové vidění k inspekci štítků, úrovní plnění, uzávěrů a integrity balení. Tyto aplikace ukázaly schopnost vizuálních senzorů zlepšit jak kvalitu produktů, tak výrobní efektivitu.
Technologické pokroky, které urychlily vývoj
Vývoj vizuálních senzorů byl urychlen pokrokem v několika vědeckých a inženýrských oborech.
Pokroky v digitálním zpracování obrazu zlepšily techniky zdokonalování obrazu, redukce šumu a extrakce funkcí. Výzkum v oblasti rozpoznávání vzorů umožnil systémům identifikovat objekty, symboly a opakující se vizuální prvky s větší přesností. Zlepšení v počítačové grafice podpořila efektivnější reprezentaci a analýzu obrazů.
Studie lidského vizuálního vnímání také ovlivnily metody interpretace obrazů, zatímco pokroky v inteligentních výpočetních technologiích zlepšily klasifikaci objektů, rozpoznávání vzorů a schopnosti automatizovaného rozhodování.
Tyto vývoje umožnily systémům strojového vidění posunout se nad rámec jednoduchých inspekcí a vykonávat složitější úkoly, jako je vedení robotů, klasifikace vad, sledování objektů, dimenzionální měření a řízení procesů.
Evoluce zobrazovacích zařízení
Pokrok vizuálních senzorů byl úzce spojen s vylepšením technologie snímání obrazu.
Rané systémy strojového vidění se spoléhaly na technologii kamerových trubek pro akvizici obrazů. I když tato zařízení umožňovala základní vizuální inspekci, často trpěla nižší kvalitou obrazu, větší fyzickou velikostí, sníženou stabilitou a vyššími požadavky na údržbu.
Úvod senzorů CCD (Charge-Coupled Device) představoval významný technologický průlom. Senzory CCD poskytovaly lepší kvalitu obrazu, vyšší citlivost na světlo, lepší spolehlivost a konzistentnější výkon. Tyto výhody výrazně zlepšily přesnost a účinnost systémů strojového vidění.
Přijetí technologie CCD umožnilo přesnější inspekční, měřicí a automatizační aplikace napříč širokým spektrem průmyslových odvětví.
Moderní technologie vizuálních senzorů
Moderní vizuální senzory nabízejí schopnosti daleko přesahující možnosti dřívějších systémů. Pokroky v návrhu senzorů, zpracovatelském hardwaru, komunikačních technologiích a algoritmech pro zpracování obrazu významně zvýšily výkon a funkčnost.
Současné systémy dokážou zachycovat vysoce rozlišené obrázky, zpracovávat velké objemy dat o obrazech v reálném čase a provádět složité analýzy v rámci zlomků sekundy. Vlastnosti jako automatické zaostřování, vysokorychlostní pořizování obrázků, trojrozměrné snímání, rozpoznávání objektů a pokročilé měřicí funkce jsou nyní široce dostupné.
Jak se robotika a průmyslová automatizace nadále vyvíjejí, vizuální senzory se staly nezbytnými nástroji pro inspekci, měření, robotické navádění, monitorování procesů a automatizované rozhodování. Dnes hrají klíčovou roli ve výrobě, výrobě elektroniky, montáži automobilů, logistice, výrobě polovodičů, produkci lékařských přístrojů a dalších pokročilých průmyslových aplikacích.
Závěr
Strojové vidění zlepšuje přesnost, rychlost a konzistenci výroby tím, že nahrazuje ruční vizuální inspekci automatizovanou analýzou obrazu. Jeho výkon závisí na správném osvětlení, výběru kamery, zpracování obrazu, kalibraci a integraci systému. Jak se výroba a automatizace i nadále vyvíjejí, strojové vidění zůstává nezbytné pro kontrolu kvality, detekci vad, měření, třídění a robotické navádění.
Často kladené otázky [FAQ]
1. Proč je osvětlení často považováno za nejkritičtější faktor ve výkonu systému strojového vidění?
Osvětlení přímo ovlivňuje kvalitu obrazu zachyceného kamerou. I vysokorozlišující kamera se může potýkat s detekcí vad, hran, značek nebo rozměrových vlastností, pokud není objekt správně osvětlen. Dobré osvětlení zlepšuje kontrast, snižuje stíny a odrazy a vyzdvihuje důležité rysy, které je třeba zkontrolovat. V mnoha aplikacích strojového vidění může zlepšení nastavení osvětlení mít větší dopad na přesnost inspekce než vylepšení samotné kamery.
2. Jak systémy strojového vidění dosahují konzistentnějších výsledků inspekce než ruční inspekce?
Systémy strojového vidění hodnotí každý produkt pomocí stejných naprogramovaných inspekčních pravidel, měřicích metod a akceptačních kritérií. Na rozdíl od lidských inspektorů nejsou ovlivněny únavou, změnami koncentrace, podmínkami osvětlení nebo subjektivním hodnocením. Každý obrázek je analyzován pomocí identických algoritmů, což umožňuje systému produkovat vysoce opakovatelné výsledky napříč tisíci inspekčními cykly. Tato konzistence pomáhá výrobcům udržovat stabilní standardy kvality a snižovat variabilitu inspekce.
3. Proč jsou vizuální senzory flexibilnější než tradiční fotoelektrické senzory v moderních automatizačních systémech?
Fotoelektrické senzory jsou obvykle navrženy k detekci přítomnosti nebo nepřítomnosti objektu na konkrétním místě. Vizuální senzory jdou mnohem dále tím, že zachycují kompletní obrázky a analyzují více charakteristik současně. Jediný vizuální senzor může během jednoho inspekčního cyklu kontrolovat velikost, tvar, polohu, orientaci, barvu, značky a podmínky povrchu. Kromě toho lze kritéria inspekce často upravit pomocí softwarových aktualizací namísto hardwarových změn, což činí vizuální senzory vysoce přizpůsobitelné variacím produktů a změnám ve výrobě.
4. Jak strojové vidění podporuje robotické navádění a automatizované výrobní operace?
Strojové vidění poskytuje robotům přesné informace o umístění, orientaci, rozměrech a pozici objektu. Po zachycení a zpracování obrázku systém vidění vypočítá souřadnice a odešle tyto informace do řídicí jednotky robota. Robot pak může upravit své pohyby tak, aby prováděl úkoly jako operace pick-and-place, montáž, třídění, balení nebo kontrola kvality. Tato schopnost umožňuje automatizovaným systémům manipulovat s produkty, které mohou přicházet v různých polohách nebo orientacích, zatímco si zachovávají vysokou přesnost a efektivitu.
5. Proč se stalo strojové vidění stále důležitějším v průmyslech, jako je výroba, zemědělství, zdravotnictví a doprava?
Strojové vidění kombinuje pořizování obrazů, automatizovanou analýzu, měření a rozhodování do jedné technologické platformy. Ve výrobě zlepšuje kontrolu kvality a efektivitu výroby. V zemědělství podporuje monitorování plodin a klasifikaci produktů. Ve zdravotnictví pomáhá s analýzou lékařských obrazů a diagnostickou podporou. V dopravě umožňuje monitorování dopravy a rozpoznávání SPZ. Protože strojové vidění dokáže zpracovávat velké objemy vizuálních informací rychle, přesně a konzistentně, stalo se klíčovou technologií pro automatizaci, inspekci, monitorování a inteligentní rozhodování v mnoha průmyslech.
Související blog
-
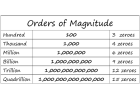
Kolik nul v milionu, miliardách, bilionu?
![Kolik nul v milionu, miliardách, bilionu?]()
2024/07/29
Milion představuje 106, snadno pochopitelná postava ve srovnání s každodenními předměty nebo ročními platy. Miliarda, což odpovídá 109, z... -
Datový list IRLZ44N MOSFET, obvod, ekvivalent, pineout
![Datový list IRLZ44N MOSFET, obvod, ekvivalent, pineout]()
2024/08/28
IRLZ44N je široce používaný N-kanálový mosfet.Je známý svými vynikajícími schopnostmi přepínání, je vysoce vhodný pro mnoho aplikací,... -
Teplota baterie je příliš nízká, nabíjení se zastavilo.Jak to opravit?
![Teplota baterie je příliš nízká, nabíjení se zastavilo.Jak to opravit?]()
2024/10/6
Problémy s nabíjení baterií mobilního telefonu jsou běžné, ale lze je efektivně spravovat.Teplota hraje velkou roli v účinnosti baterie, pr... -
BC547 Transistor Comprehensive Guide
![BC547 Transistor Comprehensive Guide]()
2024/07/4
Tranzistor BC547 se běžně používá v různých elektronických aplikacích, od základních signálních zesilovačů po komplexní obvody oscil... -
Kompletní průvodce multiplexery a jejich roli v digitálních systémech
![Kompletní průvodce multiplexery a jejich roli v digitálních systémech]()
2025/09/20
Multiplexery jsou komponenty v digitálních systémech, které jsou navrženy tak, aby nasměrovaly více vstupních signálů do jediného výstupn... -
Komplexní průvodce pro SCR (usměrňovač ovládaného křemíkem)
![Komplexní průvodce pro SCR (usměrňovač ovládaného křemíkem)]()
2024/04/22
Křesťánové usměrňovače (SCR) nebo tyristory hrají klíčovou roli v technologii Power Electronics kvůli jejich výkonu a spolehlivosti.Tento ... -
LR621, SR621SW, 364, Ekvivalenty a náhrady baterie AG1
![LR621, SR621SW, 364, Ekvivalenty a náhrady baterie AG1]()
2024/07/15
Klapivé baterie LR621 a SR621SW převládají v kompaktních elektronických zařízeních, jako jsou hodinky, malé hračky, kalkulačky a odlehlé ... -
Základy obvodů op-amp.
![Základy obvodů op-amp.]()
2023/12/28
Ve složitém světě elektroniky nás cesta do jejích tajemství vždy vede k kaleidoskopu komponent obvodů, jak vynikající, tak komplexní.V srd... -
Porovnání rozdílů a aplikací NMOS a PMOS
![Porovnání rozdílů a aplikací NMOS a PMOS]()
2024/11/15
Pochopení rozdílů mezi tranzistory NMO a PMOS je důležité při navrhování účinných obvodů.NMOS (N-typ-typ-oxid-Semiconductor) a PMOS (p-ty... -
CR2450 vs CR2032 Porovnání: Vše, co potřebujete vědět
![CR2450 vs CR2032 Porovnání: Vše, co potřebujete vědět]()
2025/09/15
Blatonobílé baterie jako CR2450 a CR2032 Power Mnoho každodenní elektroniky, od hodinek a dálkových ovladačů po lékařská a průmyslová za...




Hot Parts
- E2458NLT
- SFH617A-3X007T
- TPIC1353
- 06033G184ZAT2A
- C2012Y5V1H105Z/0.85
- SPD02N60S5
- MAX13085EESA
- PCI1251BGFN
- DS91C180TMAX
- GRM3166T1H6R0DD01D
- MSC1210Y3PAGT
- EVK71-050
- GRM0335C1E1R3BD01D
- XADRP-12V
- IP5003CX9/LF
- AD845JNZ
- GRM1885C1H2R2BZ01D
- LPV358MM/NOPB
- ST19AF08BR20QMAA
- BD6047GUL
- VI-912421B
- ISL6269ACRZ-T
- EPM3064ATC100-10
- MLX90333KGO-BCT-000-RE
- XC6215B332GR
- TPSB475M020R0750
- GRT31CC80G226ME01L
- M3062CM6T-843GP
- MAX211ECAI-T
- C4532CH3F151K160KA
- PT6718-S
- VOM618A-8T
- T495D686K016ATE070
- T491A225K010AT2478
- T491B476K010ZTAU00
- ADV7611WBSWZ-RL
- H9DA2GH1GHCMAR-4EMR
- HD6417750RF200V
- ISPLSI2128VE-100LTN176
- LM3S9D90-IQC80-A2SD
- TC6326AF
- NL88655HG10300B1
- 1D1200Z-100
- HD6432653A12F
- XC95144-7TQ100I
- MC68HC11DOCFN2
- BTT6010-1ERB
- NXE1S0305MC
- 6ES7131-6BF01-0BA0
- TYBCOA111375KC